
In the past decade, the manufacturing sector has seen significant advancements using the industrial internet of things (IIoT) to enhance robotics automation and supply chain management with machine learning and data analytics.
This type of smart manufacturing — also known as Industry 4.0 or the fourth industrial revolution — leverages interconnectivity between the physical and cyber worlds to improve data sharing between machinery and software. This helps humans make data-informed decisions as automated robots perform increasingly agile tasks, resulting in production efficiencies and improved collaboration among suppliers, vendors and customers.
DETAIL
The industrial internet of things (IIoT) describes a network of physical objects — in this instance, things on a shop floor — that are embedded with sensors, software and other technologies to connect and exchange data with other devices and systems over the internet.
The fourth industrial revolution — 4IR or Industry 4.0 — is the ongoing automation of traditional manufacturing and industrial practices using modern smart technology.
Until recently, Industry 4.0 was often regarded as an interesting concept, but impractical without significant investment, which was hard to justify when many companies struggled with implementation. Recent technological advancements coupled with global supply chain impacts from the COVID-19 pandemic are changing those attitudes.
For over a decade, Southwest Research Institute has paved the way for innovations in smart manufacturing. In addition to developing automation and robotics solutions, we help improve interoperability among devices that share data across the industrial internet of things. For many of us in the industry, it feels like the proverbial overnight success that took over 10 years of hard work.
Since 2012, SwRI has championed efforts to create efficient communications between devices, first extending the open-source ROS framework to industrial communication standards. From the beginning, SwRI has tackled automating the tough-to-automate, developing tools and collaborating with other prominent industrial solution providers to move the ball forward, while providing practical resources to smaller- and medium-sized manufacturers around the world.
The ROS-I platform provides interoperability, enabling different brands of robots to work together on complex tasks.

SwRI demonstrated a smart manufacturing implementation featuring interoperable robots and controls at the 2018 International Manufacturing Technology Show. SwRI enabled interoperability across robot controls, devices and software through a NIST-funded project that bridged two open-source platforms, ROS-Industrial and MTConnect.
The “5 Cs” of Smart Manufacturing
Industrial robotics have evolved from a single manipulator to a complex ecosystem of fixed, driving, crawling and even flying robots equipped with various sensors, ranging from simple encoders to laser scanners, all carrying out divergent concurrent tasks integrated into increasingly demanding scenarios. SwRI teams up with industrial automation hardware/software vendors to solve practical challenges to complex logistical problems. We start with looking at the “5 Cs” of smart manufacturing — communication, connection, computation, coordination and configuration.
Communication explains how data and information are exchanged between entities, while connection focuses on which computational components should communicate with each other. Computation relates to processing of information and algorithms, including machine learning and artificial intelligence. Configuration includes binding configurable parameters of individual entities and systems, while coordination relates to orchestrating activities with resource management.
Evaluating automation solutions in the 5 Cs context helps standardize data to support international Industry 4.0 and IIoT initiatives, especially with complex systems requiring interoperability.
DETAIL
Willow Garage created open-source hardware (Personal Robot 1, PR1) and software (Robot Operating System, ROS) development platforms. PR2 used open-source robotics “middleware,” software that enables communication or connectivity between two or more applications or components on a distributed network.
Interoperability via “Industry 4.0”
To illustrate how difficult interoperability can be, consider the difficulties your mobile phone may have syncing with your car’s infotainment system or the inability of Alexa-enabled devices to work with Siri. For Industry 4.0 and similar initiatives where interconnectivity is a goal, the sticking point has long been interoperability, or the efficient movement of information between a variety of proprietary devices. Most solution providers offer proprietary frameworks, plus add-ons to facilitate this sort of agile processing. But you must purchase the elements to “capture” clients in their ecosystem.
Long-time providers of manufacturing technology have lacked incentives to enable the agility and interoperability needed to realize the full potential of smart manufacturing. This roadblock may be associated with requirements to share information about how a proprietary process would enable other branded devices to share and leverage information.
SwRI leads several initiatives to develop more flexible and open approaches that facilitate more efficient movement of data across devices. Our work includes improving interoperability among industrial robots, commercial flight test equipment and computers used in military vehicles.

Multi-robot optimization strategies are based on many factors, including proximity to the proper end effector to manipulate a specific payload.

SwRI engineers develop techniques to orchestrate collaboration between different manufacturing devices using a variety of robotic arms.
Bridging Systems with ROS-Industrial
In the automation and manufacturing space, SwRI has been developing interoperability solutions since the launch of the ROS Industrial (ROS-I) open-source project. In 2012, SwRI established ROS-I as an open framework of libraries and tools for a wide range of industrial robotics applications.
The open-source Robot Operating System — ROS, and second generation ROS 2 — was developed at multiple institutions and for multiple robots, including many institutions that received PR2 robots from Willow Garage. ROS-I, known for enabling robots to do new things regarding capability, is a framework that enables different robots and mechanical devices to share information regardless of brand.
In 2013, a NIST-backed MTConnect standard project bridged ROS to another open standard to enable smooth sharing of information across proprietary devices. This delivered on the promise of a lower-cost, more flexible means to enable richer interaction between devices on a shop floor. In 2017, a follow-on project was launched, again backed by NIST, that resulted in a “many-to-many” collaboration model. Practically, this dynamic process means all the devices on the floor understand what all the other devices are doing and can respond based on rules and established priorities. SwRI demonstrated this new implementation at the International Manufacturing Technology Show in Chicago in 2018.
DETAIL
The National Institute of Standards and Technology (NIST), now part of the U.S. Department of Commerce, is one of the nation’s oldest physical science laboratories. Congress established the agency in 1901 to overcome challenges to U.S. industrial competitiveness, which lagged behind the capabilities of the United Kingdom, Germany and other economic rivals at that time.
Since then, a recently completed program has seen the framework improved further, this time extending to additional industrial communication standards, the Open Platform Communications Foundation’s Unified Architecture (OPC-UA) and the Object Management Group® Data Distribution Service (DDS™). Released in 2008, OPC-UA is a machine-to-machine communication protocol for industrial automation developed by the OPC Foundation. DDS is the first open international middleware standard directly addressing publish-subscribe communications for real-time and embedded systems. This expansion demonstrated a richer and more complete tool set allowing dynamic coordination while leveraging standard industrial communications specifications. The SwRI team provided the architecture and tools to enable the coordination of tasks via a software implementation called Orchestrator. This independent library adapted prior NIST work into a stand-alone application. The team demonstrated the application using a network of devices that “spoke different languages,” proving it could share information between these machines in near real time.
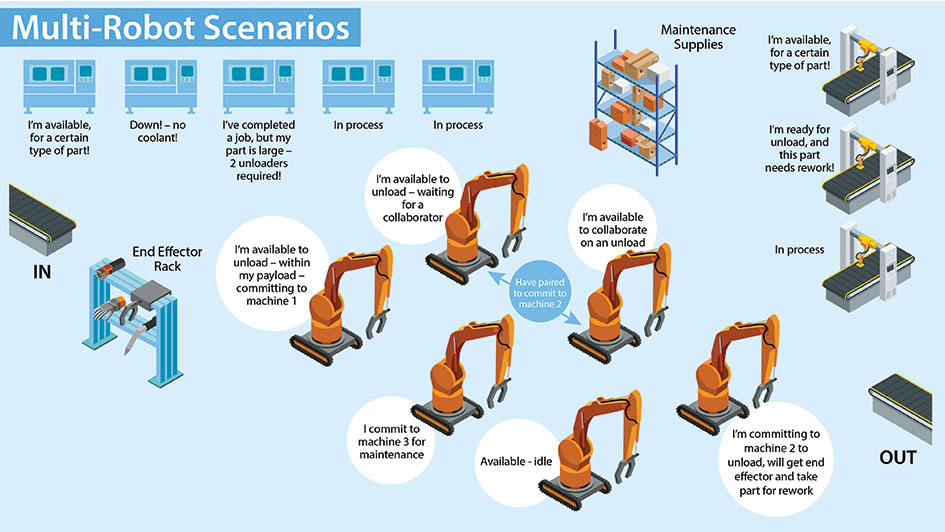
This illustration depicts many-to-many tasking where multiple robots can perform agile tasks through self-optimization.
Standardized Framework to Move Data
Standardized frameworks that facilitate data-sharing are key to moving interoperability forward. This type of data sharing underscores how standards in communication and coordination can enable industry-wide advancements. For example, the previously described implementation between ROS and MTConnect could serve as a foundation to improve information sharing between assets. MTConnect provides the data model for the manufacturing information, while ROS, and now ROS 2, provide architecture for moving that data. The marriage of MTConnect and ROS enables them to “ride” on top of traditional industrial communication standards including DDS, the default communication for the recently released ROS 2 platform. In the computing world, orchestration is the automated configuration, management and coordination of computer systems, applications, and services. Applying orchestration to industrial manufacturing would manage complex tasks and workflows, coordinating and optimizing material movement in real time. Because each device or family of devices had its own specific protocol, historically that is where coordination would break down. However, the MTConnect and DDS protocols provide standardized information with a bridge to MTConnect Orchestrator middleware, which interfaces with custom protocols, ROS/ROS 2 framework and other OAP-UA- or DDS-compliant applications to share all information with all devices on the shop floor.
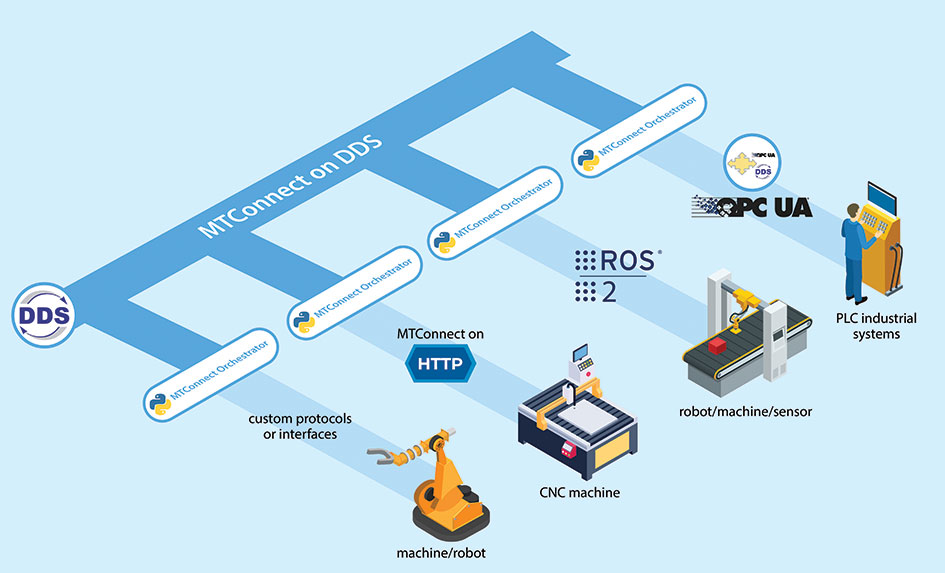
This illustration depicts how various parts in a manufacturing system — a robot, computer numerical control (CNC) machine, sensors and other devices using programmable logic controller (PLC) computer-driven systems — can be orchestrated to automate tasks. Orchestrating tasks over DDS protocol provides a coordinated methodology for the MTConnect interoperability standard to communicate commands to robots and other hardware via unique software/middleware bridges.
OIL AND GAS CASE STUDY
To illustrate both the challenges and the benefits of interoperability, consider the high mix of production components used by the oil and gas industry. Challenges include vast amounts of data contained by individual pieces of equipment and the ability to report on their condition or state when all devices in the factory “speak” a different language. Management of this data requires knowledgeable staff to create spreadsheets to effectively route materials and to understand which machines should process which product. Due to the high-mix nature of the business, the balance between creating batches of product to run and prioritization based on customer demand leads to more complications, changeovers and other possible inefficiencies.
A recent SwRI project for an oil and gas company used orchestration software components to enable different manufacturing devices to indicate their ability to collaborate with other pieces of equipment in the factory. Because this is all “online,” artificial intelligence may be added “on top” to enable more efficient material routing, batch sizing and maintenance scheduling. Because this is all software, no additional hardware is needed, lowering the overall deployment cost.
This oil and gas implementation example enabled machines to interact and share information with near-real-time performance. Leveraging the cloud gave manufacturing line planners the insights to understand what they could and could not do at any time during their production cycle.
Conclusion
This oil and gas production application is an excellent example of how SwRI works with industry partners to solve practical challenges for industrial end users. With so many solutions available, it can be confusing to pick the right one or to continue to use the ones that originally came with a specific piece of hardware.
Data can offer many opportunities for increasing efficiency and velocity in global manufacturing. Many powerful tools exist to use data to improve a specific manufacturing process or to enhance an entire supply chain. In any case, improved interoperability is the key to unlocking data for smarter manufacturing.
Industry 4.0 and smart manufacturing can seem overwhelmingly complicated, but it helps to start by looking at the bigger picture through the lens of the 5 Cs, looking at the best ways to communicate, connect, compute, coordinate and configure data to improve automation and orchestration.
Questions about this story or Smart Manufacturing? Contact Paul Evans at +1 210 522 2994.
About the Author
Matt Robinson is assistant director of SwRI’s Manufacturing and Robotics Technologies Department and oversees the ROS-Industrial Joint Industry Program. ROS-I develops and sustains open-source robotics capabilities to advance industrial automation. Robinson also serves on the Advanced Robotics for Manufacturing (ARM) Institute Technology Advisory Committee.
