
Background
Safely and efficiently navigating signalized intersections poses an unsolved problem for automated vehicles in the general case. The global variety of signal designs and configurations coupled with the myriad topologies of the intersections themselves require existing automated vehicles to use so-called high-definition (HD) maps to successfully navigate an environment. The resources necessary for these maps — time, financial, and human — are prohibitive, resulting in even very large organizations mapping only a handful of cities. SwRI’s prior research in traffic signal phase detection in camera has applicability in only limited environments and does not address the topology problem.
Meanwhile, governments at all levels — city, state, and federal — have shown consistent interest in vehicle-to-infrastructure (V2I) communication for a variety of purposes. SwRI’s heavy involvement in standards development, equipment testing and validation, and deployment provide substantial expertise in the field. Deploying these systems for signalized intersections requires building a lightweight map that nonetheless provides relevant information for intersection negotiation.
Approach
Research for this project developed along two lines: integration of the automated vehicle (AV) system with the connected vehicle (CV) system, and a relevant operational application known as “greenspeed.”
SwRI’s AV and CV systems were developed independently, for different purposes, on different hardware, using different communication standards and different map formats. The team designed a fusion technique that permitted the systems to interact, allowing the AV to interpret and make decisions based on the information from the V2I system, including reconciling the two map formats.
“Greenspeed” is a term that means regulating the speed of a vehicle to ensure it always approaches a traffic signal while the relevant signal is green. The team used the hybrid connected/automated vehicle (CAV) system to vary the vehicle’s speed along its planned path to attempt to achieve this goal using SwRI’s automated passenger sedan and V2I-equipped traffic signal.
Accomplishments
The first line of investigation, enabling the hybrid system to fuse data from both the AV sensors and the CV radio, was successfully accomplished. The system aligned the two maps and enabled reasoning about intersection states along the AV’s planned path.
The second line of investigation, the greenspeed application, was designed and iterated, but infrastructure challenges beyond the scope of the project limited testing of the impact on traffic flow. However, in real-world testing, the vehicle successfully responded to changes in signal phase for the relevant lane, partly satisfying the project objective, and preparing for application to client objectives.
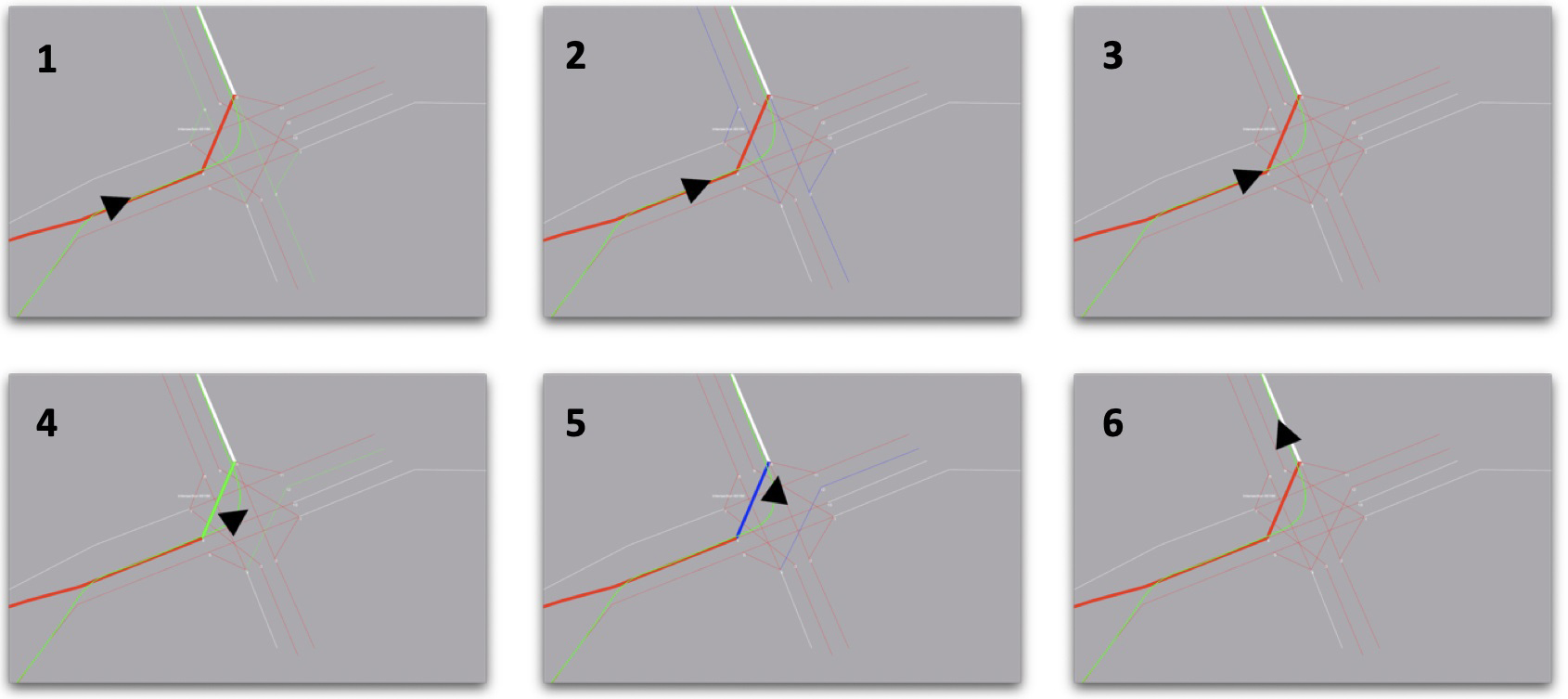
Figure 1: Simulated greenspeed operation. The CAV (black triangle) times its approach to the intersection (panels 1–3) so that it enters just after the light for its path turns green (panel 4).