Background
Simulation tools can be highly useful for development and validation of autonomous vehicle systems. To thoroughly test new algorithms and techniques in simulation, researchers require numerous test environments that share certain relevant characteristics with a given real (geo-specific) location where the vehicles will be operating.
Approach
The objective of this project is to evaluate the effect of perturbing geo-environmental variables to create one or more synthetic environments that are similar (from the perspective of the autonomous system) to a given geo-specific environment but are different enough to exercise the autonomous system in ways the original environment does not. We followed this approach:
- Assemble a novel software pipeline to create realistic 3D simulation environments from real-world Geographic Information Systems (GIS) data.
- Develop algorithms to perturb the GIS data in user-configurable ways, allowing for generation of new synthetic environments using that pipeline.
- Calculate metrics to compare the original and perturbed environments in ways important for autonomous system performance.
Accomplishments
SwRI assembled a novel software pipeline that rapidly converts real-world GIS data into a realistic-looking 3D simulation environment suitable for development and validation of autonomous systems (see Figure 1). A new environment with accurate terrain elevation and various types of foliage and terrain textures can be crafted using procedural tools in a matter of hours, instead of days as with more traditional methods.
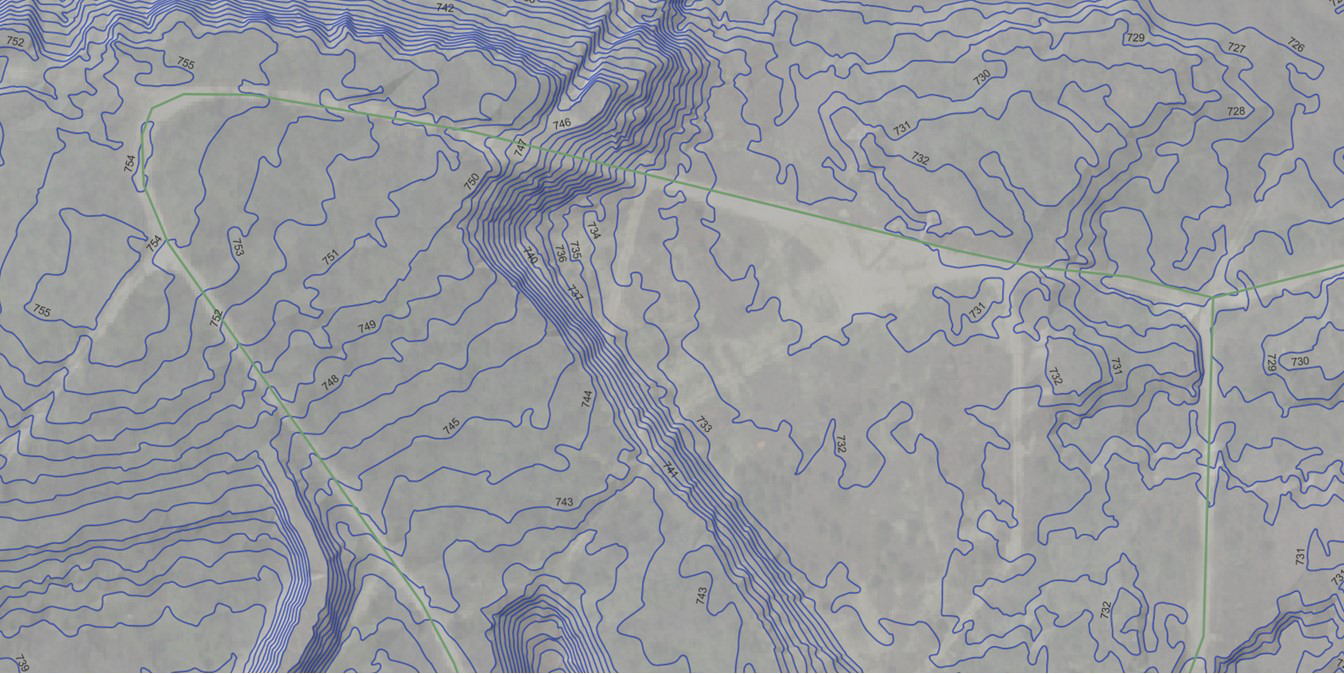
Figure 1a: High-resolution GIS data is gathered into a multi-layer map including elevation data and satellite imagery.
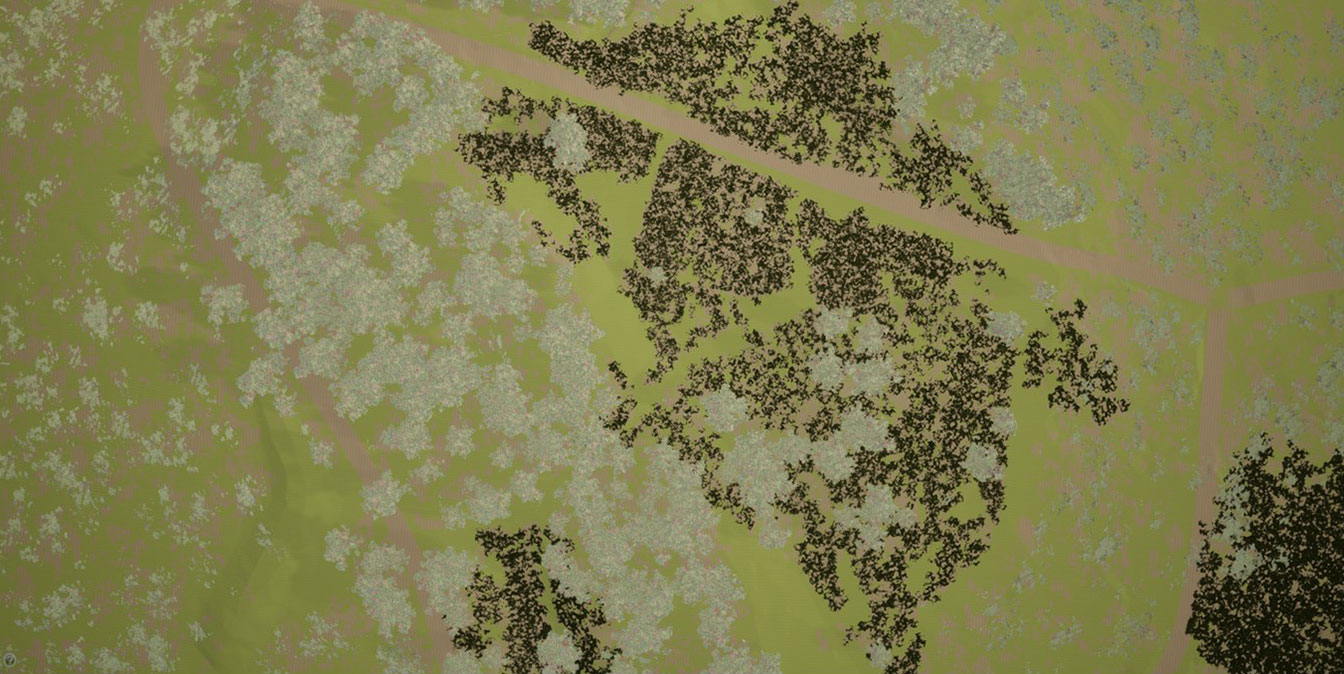
Figure 1b. Through a novel software pipeline, the real-world GIS data is translated into a realistic-looking 3D simulation environment.
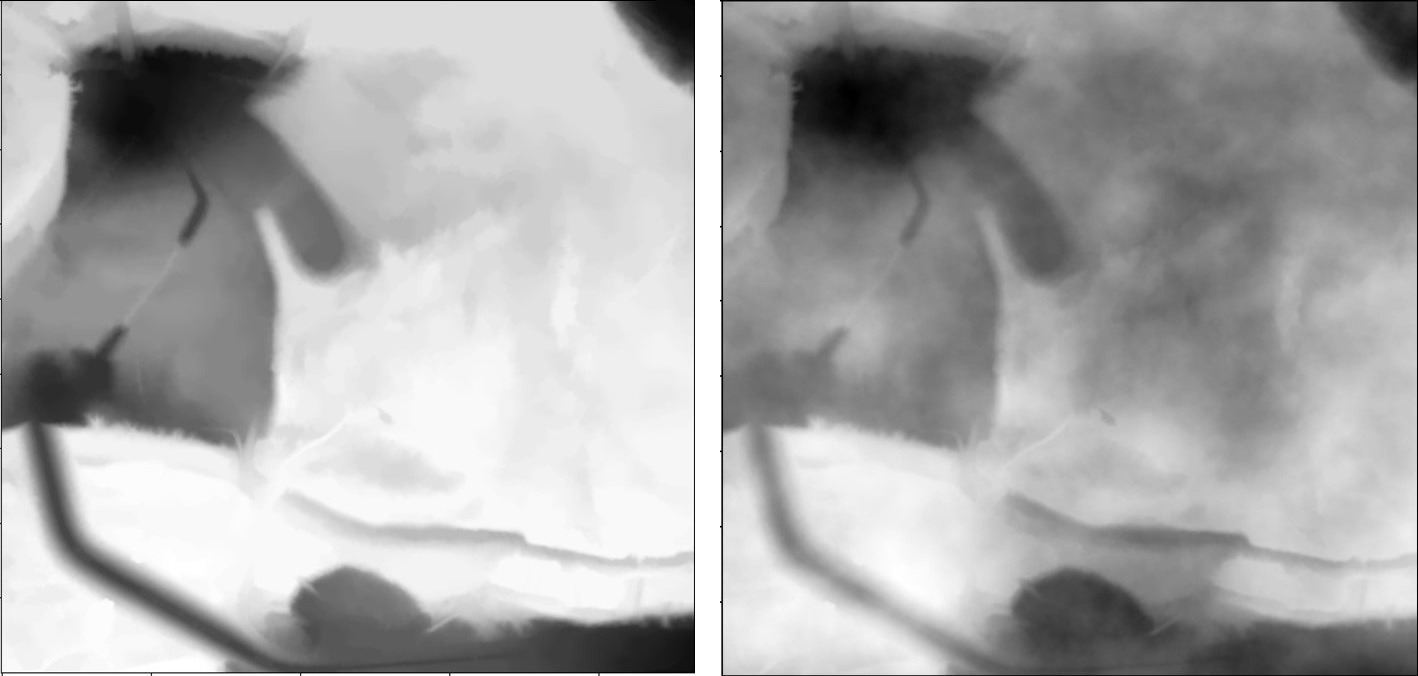
Figure 2: (Left) A DEM of a real-world location. Lighter areas represent low elevation, and darker areas are higher elevations. (Right) A version of the DEM that has been perturbed, creating a similar but modified elevation map.