Earlier this year we had the opportunity to meet with space scientists, cavers, and roboticists to discuss the future of cave exploration for both on- and off-world environments at the 4th International Planetary Caves Conference in Lanzarote, Spain. A topic often discussed in the space community is how to effectively use robots to perform the range of exploration tasks necessary for previously unexplored environments, such as caves.
As we look forward to future space missions that include exploration of cave systems throughout the solar system, there are many interesting robotics challenges that can be solved using Earth’s caves as testbeds. These challenges include limited power and payload capacities, difficult terrain and lighting conditions, and limited methods of navigation, localizing and mapping in cave system. We presented two papers that highlighted SwRI’s work in this area: Advancements in Exploratory Planning for UAS and Mapping a Limestone Cave with an Unmanned Aerial System. This article highlights some of our experiences in this area and provides some insights into where our future work will focus.
Developing UAS Tools for Drone Cave Exploration
Unmanned aerial system (UAS) navigation and exploration planning is just one area where Southwest Research Institute (SwRI) is offering insight to organizations interested in studying confined spaces. Combining our technical capabilities and real-world testing environments allows us to encounter and mitigate a wide variety of challenges. In our early work using UAS to autonomously explore previously unknown regions, areas we called “frontiers,” our exploratory planner did not sufficiently consider the degree to which the ceiling height can change in an organic cave environment. An exploratory planner enables the system to map and navigate new spaces without the aid of human operators. This limitation created challenges for the UAS when it would enter an area where the ceiling was so high that it was no longer visible to the robot, and the planner was unable to send the vehicle higher to explore.

An SwRI engineer and a local caving expert (left) navigate inside the cave. UAS lighting (right) illuminates Dinosaur Cave in Comal County, Texas. Inconsistent heights complicate UAS perception and navigation in caves with high ceilings.
Choosing a UAS Platform for Confined Spaces
Another challenge in autonomous UAS exploration of large, unknown environments is the fact that typical lidar-based systems are too large to deploy on a UAS when considering the size, weight and power constraints necessary for safely navigating with small platforms or through narrow openings. We developed equivalent capabilities using camera-based sensors as a lighter-weight alternative that enabled our platform to move through small passages while also taking into consideration the potentially vast ceiling height within any given moment of UAS operation. In this case, as with the previous one, key to our discoveries and advancement of capabilities was our team’s use of real-world operating environments.
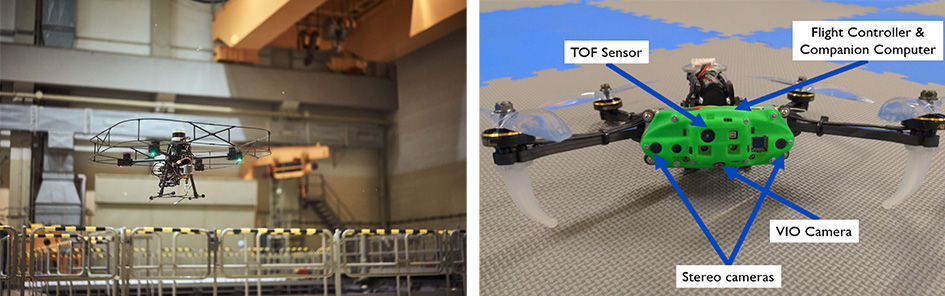
A 650 mm UAS (left) used a lidar sensor to capture point cloud data for inspection of a nuclear facility. To explore caves and confined spaces, SwRI used a 270 mm UAS (right). The smaller drone used less power when processing camera data of the cave.
SwRI began exploratory planning with a 650 mm quadcopter UAS equipped with an Ouster OS0 lidar. SwRI used a similar platform in a demonstration at an inactive nuclear power plant (EnRich robotics hackathon). The platform made sense for heavy computing loads in the hackathon and industrial applications, but it exceeded the size, weight and power constraints to operate in a cave with unpredictable spaces. The team downsized to a 270 mm quadcopter weighing 55 grams and equipped the smaller drone with a sensor time of flight (ToF) camera, which uses modulated infrared illumination to determine depth.
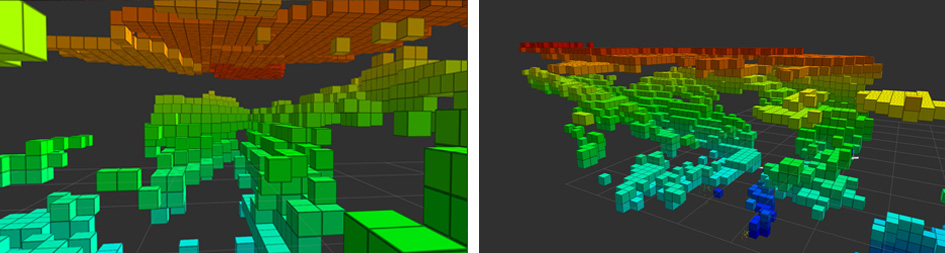
SwRI's onboard mapping software generates camera vision data for real-time navigation. The area inside the cave is represented as discrete "voxels" or cubes representing 3D space. Orange represents a cave ceiling, and the floor is blue.
Using caves as terrestrial proving grounds has been critical to the success of our applied R&D projects. Recently, we deployed a small-scale, camera-based UAS in a cave in San Antonio, Texas, to verify and validate our advancements for cave exploration and to gain additional insights into the performance of our software and sensing methods. The lessons learned from working in this operational environment led us to improve our algorithms, methods, hardware, and future research with an eye toward future off-world cave exploration. We also tested in large unused industrial facilities for an additional set of real-world challenges.
Future Research Applications
Our next adventures in adapting UAS for cave exploration will include new sensing modalities like thermal stereoscopic vision and more-sophisticated heuristics to allow our planner to select frontiers based on energy expenditure and to maximize the time spent exploring new areas, instead of backtracking through previously seen areas. We plan to pair UAS to enable multiple robots to collectively explore the world faster together. Finally, by employing methods for high-resolution postprocessing of the original 3D planner on constrained processors, we will enable valuable real-time data collection and processing for enhanced exploration.
Our team is excited about the future of unmanned systems and navigation for areas such as caves and constrained environments; we would love to hear about your upcoming project needs.
Contact Victoria Wahlen to discuss how we can help push the limits of robotics navigation, cave exploration, or other unique applications! To learn more about our related technologies, visit Unmanned Aircraft Systems and Confined Space Robots.
Note: This article was inspired by presentations that SwRI staff members, Logan Elliott and Anthony Wagner, provided at the 4th International Planetary Caves Conference in Lanzarote, Spain, in May 2023.