Southwest Research Institute (SwRI) is tackling robotics and autonomy challenges here on Earth and in space. This article focuses on our work to adapt terrestrial technology for space applications to enable autonomous mobile robot operations for the Moon and other planets. Interplanetary rovers rely on a host of sensors and techniques to navigate across the surface because there is no infrastructure supporting a GPS-like solution on any other planetary object other than Earth. There remains a need for more robust, low-latency localization solutions for rovers that operate on the moon and planetary surfaces.
To address this challenge, SwRI launched an internal research project to investigate a SwRI-developed terrestrial localization system on lunar regolith simulant (loose unconsolidated rock and dust). This technology enables mobile robotic platforms to understand their current position relative to a coordinate system. This localization system, known as Ranger, was demonstrated to be a robust, low-cost, low-weight option for high-precision localization on planetary rovers.

An AI image depicts a hypothetical rover on the Moon’s surface.

A real robot rover at the SwRI campus created tread marks in simulated lunar regolith, or Moon soil, as part of a research project to test the Ranger machine vision tool for lunar rover navigation.
The Challenge: Keeping Lunar Rovers on the Right Path
Before we dive into the Ranger technology, let’s explore why we need localization and some of the challenges we find when trying to navigate on other planets. Localization is critical for autonomy, allowing rovers to navigate and conduct their mission autonomously by maintaining knowledge of their exact location. Without localization, robots have no way to perform missions without direct human control and supervision. Autonomy in planetary exploration, such as for lunar rovers, is vital because it enables immediate, on-site decision making, which mitigates the hazards of communication delays and unpredictable terrain hazards. Autonomy enhances mission efficiency and safety without relying on constant direction from Earth.
So why not just use the same solutions we have here on Earth for automated driving vehicles and mobile robots? It turns out there are lots of reasons. Using a global navigation satellite system (GNSS), like GPS, to navigate planetary bodies requires a substantial infrastructure of orbiting satellites. Even with GNSS, secondary localization systems are desirable when primary systems fail on Earth and other celestial bodies. Reliable localization systems are necessary for upcoming lunar rover missions where the environment presents challenges for the operation of mobile robots, these environmental challenges include:
-
Lack of magnetic field for compasses
-
Craters and other terrain obstructions
-
Areas of extreme high and low illumination, unmitigated by atmospheric scattering
-
Low lighting angles that challenge visual localization techniques
-
Variables in terrain-vehicle interaction, such as regolith deformation and wheel sinkage/slippage
A Solution: Camera-based Vision Mapping of Lunar Surfaces
So now let’s refocus on our project and Ranger for solving the problem of navigating on planetary bodies beyond Earth. SwRI’s Ranger system is a practical, high-precision localization technology effective on many Earth surfaces and under many lighting conditions.
A tool in SwRI’s automated driving technology stack, Ranger uses ground-facing cameras and automation software to maintain vehicle position to within two centimeters on a given route. Machine learning algorithms match stored images of roadway surfaces or off-road trails with live images from ground-facing cameras. The images below demonstrate how Ranger is used in an automated passenger shuttle on the SwRI campus.

Left: A safety driver observes an automated shuttle self-driving on the SwRI campus. Right: Ground-facing cameras provide live a video feed of asphalt features, which the Ranger algorithm matches to pre-recorded image maps of surface material. This enables precise localization to 2 cm.
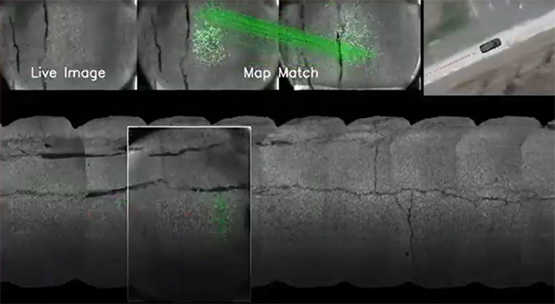
The green lines indicate when Ranger’s algorithms match live images of asphalt with stored images.
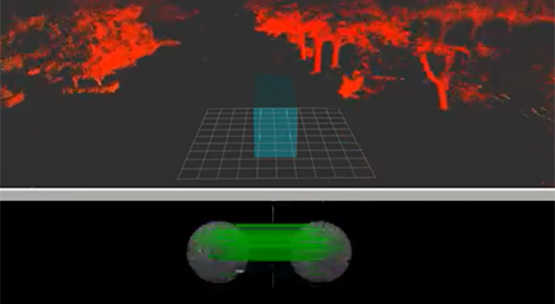
A vehicle’s autonomy stack features lidar point cloud data (red) for navigation and object detection in conjunction with Ranger for localization (green).
SwRI has used Ranger for localization of several automated driving platforms. Our hypothesis was that Ranger would be an effective option for localization on typical non-terrestrial surfaces. Our investigation showed that Ranger could be a GNSS-independent localization solution.
Setting up a Lunar Regolith Test Fixture
This project tested the approach using Ranger software and hardware mounted on a rover base. This configuration navigated across a lunar regolith simulant, capturing data as shown in the image below. Regolith can be any loose rock or dust such as soil or sand. On the Moon, regolith may consist of rock chips, dust and mineral fragments. Lunar regolith may have unique reflective characteristics under various lighting conditions. A variety of materials are available to simulate lunar regolith in laboratory settings.

Simulated lunar regolith used in experimentation.
The research protocol involved the rover moving a set distance forward and returning to its starting point, a process designed to test its retro-traversal capabilities and self-localization accuracy. The comparison between the system's computed travel distances and final positions against the exact controlled measurements provided a robust evaluation of the technology's precision.
A crucial aspect of this research involved using a motion capture system (see motion capture system image below) to measure the ground truth of the rover's location and movements. This high-precision instrument ensured the collected data reflected the actual performance of the rover under test conditions.
To emulate the moon's surface, the study also altered the orientation of the test fixture, imitating the conditions of a rover traversing a lunar crater. Additionally, the study varied the environmental lighting conditions from near darkness to bright illumination, representing the extremes encountered at the lunar south pole.

Assembling the Ranger test system and motion capture system. The motion capture system was used to compare the rover’s actual position with the position reported by the Ranger system on the rover.
Research Results & Next Steps
The results of this effort showed that Ranger can accurately match its current location to maps made during previous traversals. This matching process, as shown in the image below (green lines indicate matching), identified major “features” in the terrain and compared the currently observed “features” to previously mapped ones. The research showed the matches were sufficiently consistent for regular operation in lunar environments.
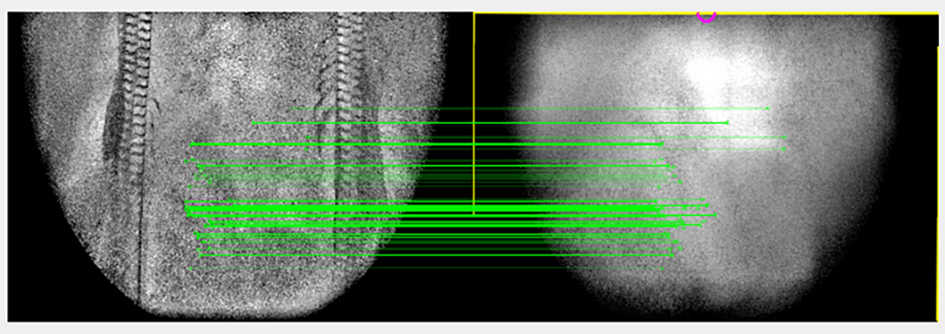
Regolith Image Matching with Ranger – This figure shows a live-image (right) compared to a previously recorded image (left). The left image, known as a “Ranger frame,” establishes the master dataset, which the rover’s Ranger system uses to traverses the regolith in search of a match. The post-processed image on the right was taken from the Ranger system mounted on the rover. The green lines in the image above indicate features that match both live and recorded images. This image matching feature allows the rover to maintain its position on a given path.
This study shows the Ranger system is a viable method for localization on other celestial bodies, providing accurate navigation in the absence of a GNSS location technology. The Moon presents unique challenges, and this research uncovered areas of future work to advance Ranger even further. The Ranger system holds the promise of a robust, low-cost, low-weight option for high-precision localization on rovers.
If you are seeking localization solutions for your autonomous systems or mobile robots for Earth-based applications or space applications, we want to talk. To learn more, contact Meera Towler or visit spacerobotics.swri.org