
Southwest Research Institute offers space robotics and automation solutions to transform Earth-based robotics capabilities into space worthy technology. SwRI leverages its extensive and accomplished history in terrestrial offroad autonomy, perception, robotics and simulation to shift those capabilities into space.
SwRI’s multidisciplinary approach to advanced science and applied engineering technology enables our government and industry clients to draw upon our hardware and software expertise in Industrial Robotics & Automation and Space Science to meet the current and future needs of the space industry.
Robotics & Automation in Space Exploration
Robotics and automation for space enables missions to be less expensive and more accessible, allowing for more complex missions farther from Earth. Advancements in industrial robotics supports manufacturing in space through increased automation for on orbit assembly and manufacturing tasks.
Adapting our existing terrestrial technologies to accommodate the harsh space environment can accelerate space exploration with regards to:
- Modifying robotics for extreme environmental conditions such as low lighting, low to no atmosphere, intense temperatures, rough terrains (rocks, dust), and limited communications.
- Applying fully autonomous technology with little to no human interaction or live troubleshooting broadens the range of exploration areas.
- Constraining resources to accommodate Size, Weight, and Power (SWAP) needs for space applications which include limiting sensing and processing capabilities and hardware weight.
Software for Space Robots
SwRI’s experience and capabilities with robotics software for use in space encompasses:
Image
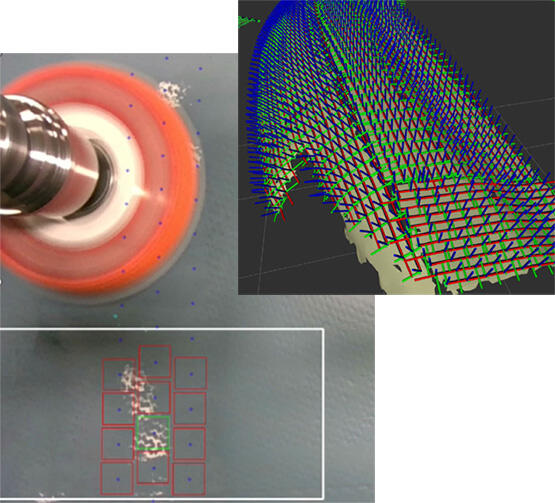
Terrestrially, Scan-N-Plan™ constructs 3D models of parts and generates raster tool paths. In an extraterrestrial environment, Scan-N-Plan™ can enable In-space Servicing, Assembly, and Manufacturing (ISAM).
- Using Robot Operating System (ROS) to enable dynamic path planning and integration with numerous sensors.
- Leveraging motion planning expertise with free-space and Cartesian tool paths and online path planning adjustments.
- Applying Scan-N-Plan approaches for 3D model reconstruction to aid in obstacle avoidance and part manipulation.
- Using machine vision for image segmentation and feature detection as well as vision systems in low light environments.
- Developing robot models, including using Gazebo and other physics-based simulations.
- Using force feedback-based control and task verification for precision assembly tasks.
Hardware for Space Robots
SwRI has extensive experience working with unstructured processes and difficult environments. SwRI’s proven experience and capabilities with these terrestrial applications can be modified for use in space:
Image

Testing terrestrial autonomous vehicle sensor systems on simulated lunar regolith.
- Developing and supporting autonomous systems, mobile robots and unmanned ground systems.
- Enabling robots to interact with delicate substrates with specific environmental considerations.
- Working with and supporting radiation-hardened robotic systems.
- Designing custom robots, including customized end-of-arm-tooling for challenging processes.
- Regularly working with commercially available robots and taking a robot-agnostic approach to component selection.