Cable management is the mythical hydra of automation problems. For every edge case that is chopped off and solved, a new one appears to bite you. Dress pack management for collaborative robots, or “cobots,” has been a recurring problem for several years. The dress pack is the bundle of cables and hoses that connect to the robot’s tool flange. The more the robot moves, the more slack is needed to avoid pulling the dress pack so tightly that it gets damaged or stops the robot. If this extra length is left loose, it risks getting tangled.
The traditional solution to this problem is to use some variant of a passive return spring. This creates problems for cobots because the springs that are powerful enough to retract the slack needed for full range of motion are also powerful enough to occasionally, but unpredictably, trip the force control e-stop in the cobot’s joints. This can be solved by limiting the range of motion of the cobot but this reduces capability and, in many of our projects, this tradeoff is unacceptable.
Smarter Dress Packs for Collaborative Robotics Cables
Having encountered this problem on many occasions – even trying several off-the-shelf management systems to no avail – SwRI decided to develop a new solution with an internal research project. The team developed a prototype work cell using a combination of elements we found to be challenging. These included a UR5 cobot with its eccentric wrist, a bulky end effector with a cable entry perpendicular to the wrist, and an internal workspace.

Test Cell Setup with ADDRESS system.
This project helped to create ADDRESS, or the Adaptive DRESing System, which addresses the challenges of passive systems with a minimal increase in complexity. And hey, if one can think of an acronym that lends itself to bad puns, one should spring for it. The video below shows the prototype in action.
Trip Switches and Powered Feed Roller
As shown in the footage, the powered feed rollers provide effectively infinite amounts of slack without high values of tension that trigger an estop. Unfortunately, the team found that at the extreme ends of travel when the dress pack is looped around the wrist, friction between the dress pack and the robot can cause tension to spike at the wrist and trigger an estop with only a couple of pounds of tension at the feed system. We solved this by building pressure sensitive trip switches into the last ten inches of the dress pack. These signal the feed system to pay out additional slack whenever they are activated. This allows the ADDRESS to use a very simple open-loop controller. The system runs independently of the robot controller and is thus easily retrofitted to a robot in much the same way as a conventional passive system.
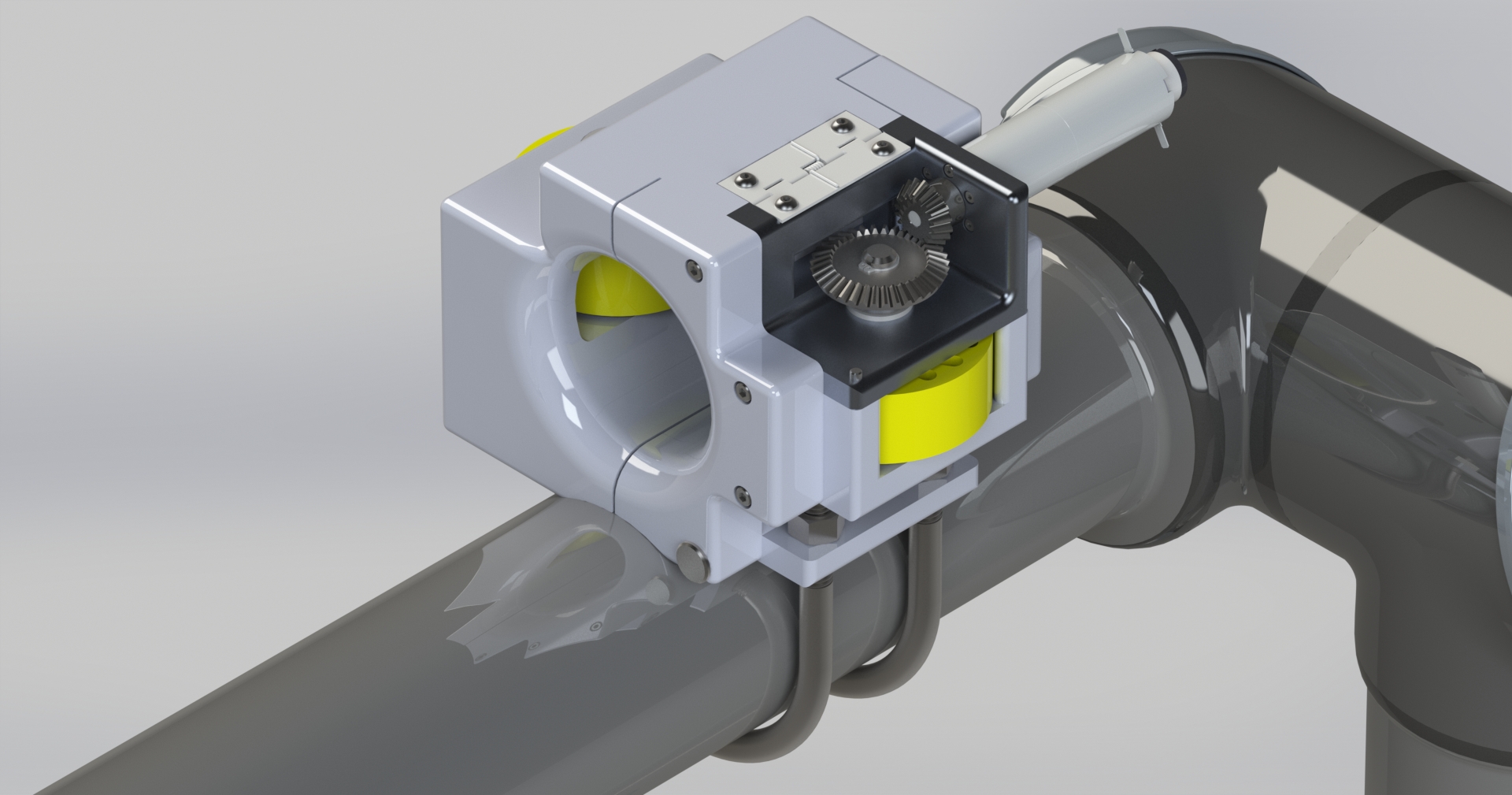
Compact ADDRESS for UR10 Robot.
Next Steps
A more polished, production-ready version of ADDRESS, rendered in the above image, is in development. We look forward to sharing more updates as we use this collaborative robotics cable management system in our Collaborative Robotics Laboratory. For more information, contact Cody Porter or call +1 210 522 6634.