
Traditionally, automotive efficiency improvements have relied on incremental hardware upgrades, but these increases are becoming more difficult to achieve. The last big jumps occurred when automakers switched from V-8 engines to turbocharged four- and six-cylinder options that can deliver the same power while burning less fuel and with the introduction of electrified powertrains. And over the last five years, smaller, more efficient models have lost market share to larger SUVs.
New ways to address efficiency are imperative. Over the last decade, the Department of Energy and the Advanced Research Projects Agency - Energy (ARPA-E) sought to leverage rapid advances in driver assistance technologies, vehicle connectivity and automation to explore creative ways to improve the efficiency of future vehicle fleets. The NEXTCAR program, short for NEXT-Generation Energy Technologies for Connected and Automated On-Road Vehicles, sought out enabling technologies that use connectivity and automation to optimize vehicle dynamic controls and powertrain operation to reduce energy consumption. These controls — implemented on a single vehicle basis, across a cohort of cooperating vehicles, or across the entire vehicle fleet — could significantly improve transportation efficiency.

NEXTCAR technologies leveraged enhanced situational awareness to optimize system operations, equipping the research vehicle with an onboard V2X radio and tablet PCs and controllers.
Conventional powertrain control is reactive, with drivers and vehicle systems responding to events after they happen. Powertrain control technologies developed under the NEXTCAR Program have the potential for predictive and anticipatory control. Connected and automated vehicle (CAV) technology previously prioritized for safety and navigation is now aiming at maximizing efficiency.
In 2016, ARPA-E awarded Southwest Research Institute and 10 other research teams around the country with funding to use CAV technologies to achieve a monumental 20% efficiency improvement. 2025 capped off an ambitious, eight-year effort to use a multidisciplinary team of SwRI experts to develop technologies to help passenger vehicles operate more efficiently, reduce energy consumption and stem the rise of greenhouse gas emissions.


Through the extensive testing on SwRI’s CAV-enabled test track, SwRI demonstrated how its NEXTCAR vehicle and the CAV technology could function in real-world scenarios, realizing the breadth of applications the technology could facilitate. For example, synchronized operation could optimize real-world efficiency, which could be applied to fleets, heavy-duty transportation and even unmanned aerial vehicles, such as drones.
Software-Driven Strategy
Detail
The software, algorithm and testing suite developed during NEXTCAR Phase I, collectively known as Eco-Mobility with Connected Powertrains, won an R&D 100 Award in 2021, recognizing it as one of the most significant innovations of that year.
For Phase I, SwRI efforts focused on using CAV data to anticipate the operating environment and integrate and optimize dynamic controls and powertrain operation in real time. This strategy targets software-driven gains rather than powertrain changes, offering a path for immediate adoption in current fleets while serving as a powerful complement to future hardware innovations. Crucially, these gains are achieved without compromising emissions, safety or drivability. In Phase I, SwRI developed and demonstrated the technology using a highly efficient Plug-in Hybrid Electric Vehicle as the platform.
As a proven leader in automotive engineering and intelligent systems, SwRI was well positioned to tackle the NEXTCAR challenge. For years, SwRI has conducted ongoing research to improve the efficiency and range of hybrid and electric vehicles as well as lowering emissions of internal combustion engine vehicles. The Institute has also been in the forefront of developing intelligent transportation systems, cooperative systems and automated driving.

From left, Research Engineer Kartik Adsule, Manager Stas Gankov and Senior Research Engineer Piyush Bhagdikar integrated prototype equipment to enable SwRI’s NEXTCAR eco-mobility capabilities. The vehicle combines CAV technology and SAE Level 4 automation to demonstrate up to 30% energy savings compared to traditional hybrid vehicles — without modifying the powertrain.
The SwRI technology developed during NEXTCAR Phase I successfully accomplished the 20% reduction goal. The resulting suite of control algorithms uses vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I) and vehicle-to-everything (V2X) technologies to optimize vehicle route, speed and power. V2X, which includes V2V and V2I, provides access to richer information about the driving scenario.
The algorithms optimized hybrid-electric system performance by efficiently coordinating power distribution across the battery, electric motor, gasoline engine and other powertrain components while also reducing overall power demand. The team achieved these results while maintaining normal human-like driving behavior and normal traffic flow.
Detail
SAE International is a nonprofit association for aerospace, automotive and commercial vehicle engineers, developing technical standards, fostering lifelong learning and connecting experts to improve mobility technology.
This success led to a new three-year Phase II contract in 2021, challenging SwRI to demonstrate an additional 10% energy savings. SwRI was one of only four teams from Phase I to advance to Phase II. In this phase, the team integrated SAE Level 4 (L4) automated driving systems, enabling highly precise control over eco-mobility maneuvers. The completed Phase II automated vehicle met its ambitious 30% energy reduction goal and showcased fully autonomous, driverless vehicle operations. SwRI developed the entire software stack, eco-mobility algorithms, drive-by-wire interface and control systems in house.
SwRI’s NEXTCAR platform combines several unique CAV technologies together to create truly innovative connected vehicle solutions. SwRI-developed drive-by-wire technology that automatically operates the vehicle’s accelerator, brake pedals and power steering system. The NEXTCAR vehicle combined conventional sensing technologies, such as lidar, with SwRI’s patented Ranger localization technology. Ranger uses a ground-facing camera and localization algorithms to navigate automated vehicles. The specialized algorithm suite includes cooperative control capabilities as well as smart lane merging and changing functionality.
NEXTCAR Applications
- Eco-driving leverages V2V and V2I information from nearby vehicles and traffic signals to minimize accelerations and generate an energy-efficient speed profile.
- Eco-routing fuses a powertrain dynamics layer on top of existing off-the-shelf navigational services to present energy optimal routes specific to vehicle powertrain and driver behavior.
- Power-split optimization improves hybrid vehicle energy consumption using predicted route data and a high-fidelity vehicle model to select the most efficient powertrain operating mode.
- Driver speed advisory provides a scalable framework to inform drivers about how speed affects economy, which can be integrated with a navigation system or mobile application.
- Augmented by traffic simulators, SwRI’s NEXTCAR chassis dynamometer assesses fuel economy, emissions, CAV algorithms and new technologies.
- Powertrain-centric solutions incorporate advanced hybrid powertrain control for engines and transmissions as well as ultra-low NOx solutions for heavy-duty trucks.
SwRI’s eco-mobility technology developed under NEXTCAR includes different applications that can be used together or individually. The technology could potentially revolutionize the transportation industry while helping reduce energy consumption and emissions. The technology can generate measurable savings, even in scenarios with limited or no connectivity to connected vehicle information, relying solely on the sensing capabilities of existing modern production vehicles.
Merge-Assist Algorithm
Through the NEXTCAR II program, SwRI developed a special merge assist algorithm. Merging lanes and highway interchanges are challenging for human drivers and even more so for automated systems. These scenarios often require split-second negotiations. These safety-critical maneuvers can be affected by many factors, including road configuration, vehicle size and visibility. Current automated-merge software often relies on established priorities, such as a first-in-first-out (FIFO) order, and on long-range V2V communication and a roadside coordinator. FIFO applications have the potential for string instability, where each subsequent merging vehicle brakes a bit later and harder than the preceding one.
The SwRI solution used a decentralized computational approach that avoids prioritization altogether. Through an internally funded project, the team developed a set of related algorithms that handle lane merges and highway interchanges with high efficiency, using SAE L2+ autonomy, from driver-assisted systems to full autonomy. The decentralized systems allow the vehicles to operate independently but cooperate to optimize merging while improving traffic flow and reducing energy consumption. This new algorithm shows 23% improvements in energy efficiency and a 6% higher average velocity over FIFO algorithms along a 500-meter stretch of roads around the merge point. In a highway interchange case, control barrier functions protect vehicles from collision using predictor-corrector feedback loops to provide agility and enhanced safety. The behavior reacts quickly, like a racecar driver, and has proven more resilient when something unexpected happens, such as a vehicle losing power.
The methodology behind the algorithms optimizes the operation of individual agents, enabling decentralized cooperation among multiple agents and enhancing system-level performance. Based on the observed agility of groups of vehicles controlled by the merge-assist algorithm, the team sees the potential to extend it to unmanned aerial vechicles. Drone-to-drone very-short-range communications require low power and minimize detectability or interference, key points of interest for this application.

This graphic shows how SwRI’s merge algorithm manages interchange lane swaps at 55 mph, showing how the 12 vehicles effectively merge after 3 seconds.

The merge-assist algorithm emulates race-car driving, providing excellent situational awareness through V2V, decentralized operation and no prioritization, predicting the actions of other drivers to quickly adjust to their movements. A lean computational footprint offers low energy consumption and predictability with respect to merging ahead or behind another vehicle and provides a more comfortable ride. Predictability improves robustness and agility over other control algorithms.
Next Steps
In June 2025, years of hard work, innovation and collaboration culminated at an ARPA-E capstone event at the American Center for Mobility in Michigan. SwRI staff from the Powertrain Engineering and Intelligent Systems divisions attended the event along with ARPA-E representatives, stakeholders from the mobility industry and other NEXTCAR teams from around the country. At this ARPA-E field day, SwRI’s NEXTCAR vehicle performed highly accurate and repeatable automated driving tasks along a pre-mapped route. The vehicle’s eco-driving controller showed spectators optimized speed information in real time. SwRI’s NEXTCAR demonstration showcased the benefits CAV technology and automation offer the mobility industry, demonstrating greater efficiency and greenhouse gas emission reductions.
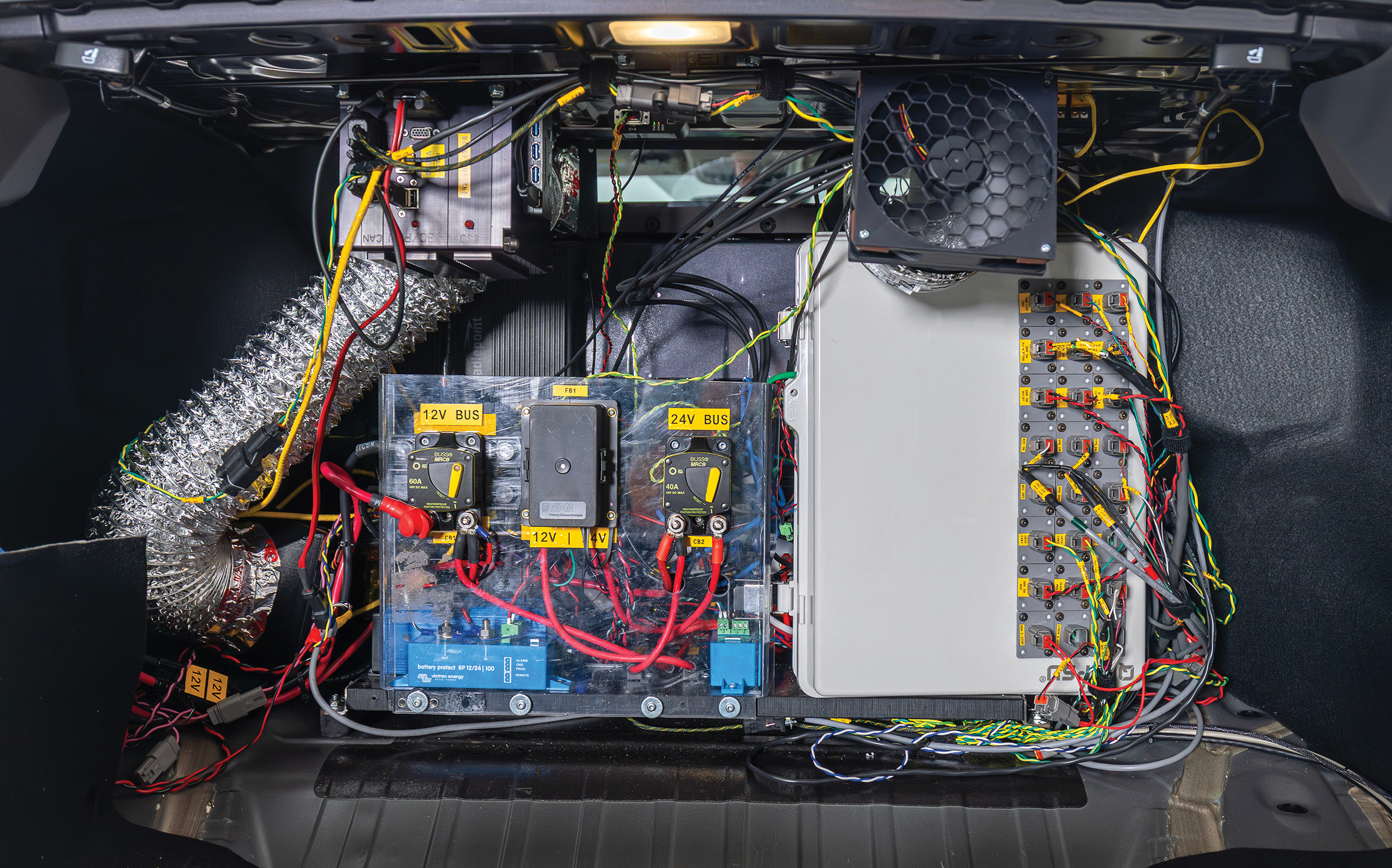
SwRI integrated custom and commercial components to create the “brain” behind NEXTCAR’s eco-mobility applications to develop and demonstrate in real time cutting-edge energyefficient technologies.
While originally shown using a plug-in hybrid vehicle, both DOE and SwRI internal funding demonstrated that eco-mobility applies to all vehicle powertrains, including pure electric, conventional combustion engines and conventional hybrid vehicles. The technology would be particularly beneficial for heavy-duty and fleet vehicles. In addition to the primary benefits of safety, efficiency and energy savings, the team is assessing secondary benefits, such as using algorithms to enhance the lifespan of powertrain components to reduce maintenance and repair costs.
The long-term vision for this platform is creating a unified control system architecture for all modes of transportation. This will involve developing new algorithms and creating new validation tests and standardized testing to ensure the high standards.
Additionally, over the last eight years, SwRI collected vast amounts of connected vehicle data associated with traffic simulations, custom high-fidelity vehicle simulators, algorithm refinement and CAV dynamometer testing. At present, the team is looking for collaborators to take advantage of the data and development to continue to innovate advanced CAV algorithms and expand the benefits.
The team is excited about what’s next for NEXTCAR’s eco-mobility technology.
About the Authors
Stas Gankov, manager of SwRI’s Advanced Algorithms Section, leads advanced algorithms and test cell automation system activities. He was the principal investigator of SwRI’s NEXTCAR program. Piyush Bhagdikar is a senior research engineer in Advanced Algorithms, focusing on dynamical systems, controls and modeling for CAVs and electrified vehicle systems. Dr. Mrdjan Jankovic, a staff engineer in the Advanced Algorithms section, has extensive experience in powertrain engineering, ADAS and nonlinear control theory. He has pioneered fuel-efficient technologies and collision-avoidance algorithms.

Questions about this story or Connected Powertrain Solutions? Contact Stas Gankov at +1 210 522 6206.
The authors want to acknowledge the contributions of Institute Engineers Dr. Michael Brown of SwRI’s Intelligent Systems Division and Dr. Jayant Sarlashkar of the Powertrain Engineering Division to SwRI’s NEXTCAR eco-mobility projects.