
Background
Connected vehicles communicate with each other and roadway infrastructure using low-latency media such as dedicated short-range communication or Cellular-Vehicle-to-Everything. One such form of communication is the Basic Safety Message (BSM), which provides position, heading, and scalar velocity information for a vehicle. This research effort explored whether BSMs contain sufficient information to provide meaningful short-term prediction of vehicle location, even in the presence of variation in driving behavior and roadway geometry and using only data from individual vehicles. Accurate short-term prediction would enable applications to enhance safety and enhance the value of BSM data collections.
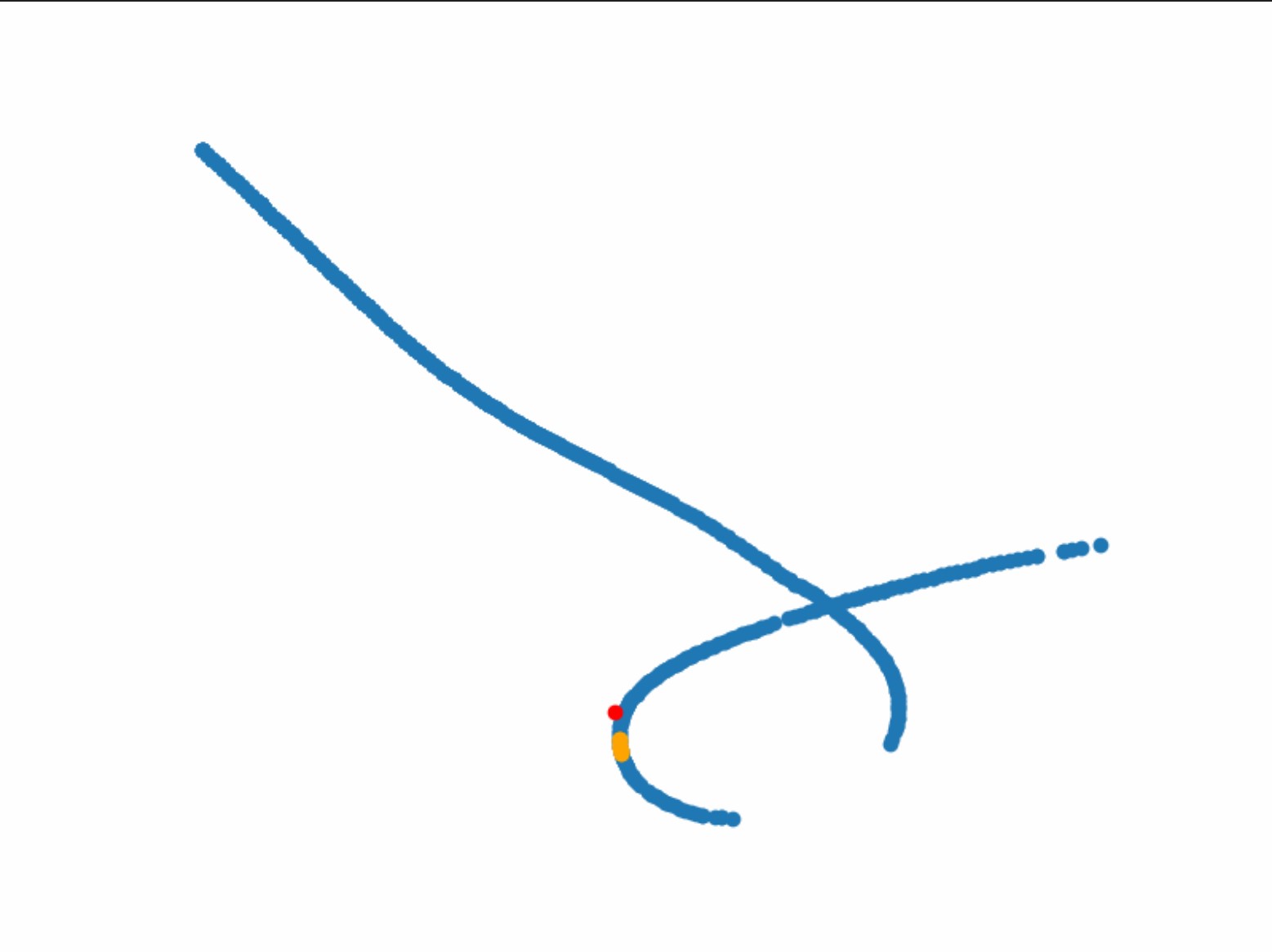
Figure 1: Illustration of prediction process with the actual vehicle path shown in blue, data window used for prediction shown in yellow, and predicted location shown in red. Here the vehicle is accelerating out of a curve, leading to a challenging prediction scenario.
Approach
Effective pursuit of the research objectives required substantial quantities of data. We utilized several relevant, high-quality, publicly available BSM data sets collected in Virginia, Florida, and Wyoming. Two prediction approaches were developed. The first approach used a physics-based prediction model where future vehicle location was predicted based on a short history of vehicle dynamics, including position, speed, and heading. The second approach used a machine learning prediction model which predicted short term vehicle dynamics without use of a specific model. In both cases, the prediction algorithms were designed to function without using contextual information like roadway type or vehicle history, enhancing the robustness and generality of the prediction technique.
Accomplishments
The prediction algorithms were evaluated by predicting positions at several different times in the near future and evaluating these predictions against actual vehicle data. Performance was evaluated over a variety of driving conditions, including interstate, arterial, and local roads. It was found that physics-based prediction generally outperformed the machine learning technique under these challenging test conditions, providing average errors ranging from 6 to 32 meters depending on prediction time. The research proved the basic feasibility of predicting a vehicle’s position a short time in the future using real-world BSM data and provides quantitative results to guide the incorporation of the techniques in practical applications.