
Background
Southwest Research Institute ® (SwRI®) has decades of experience developing and deploying intelligent transportation systems (ITS) software throughout the country and strives to stay at the forefront of providing advanced transportation technology. In collaboration with several states’ department of transportations (DOT), this research explored the use of modern machine learning techniques and Automated Vehicle Location (AVL) and Roadside Weather Information Systems (RWIS) devices to create actionable recommendations for winter storm recovery operations. The results from this work demonstrate the potential of data driven models when paired with a user-friendly interface to assist response teams in near real-time.
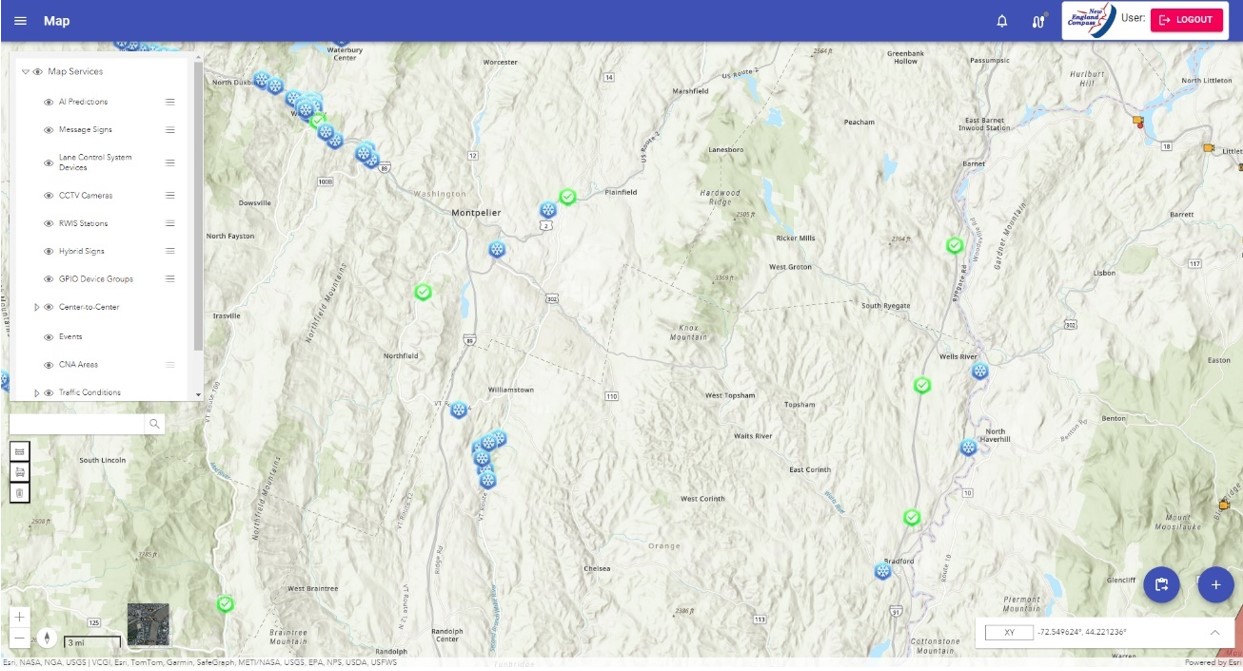
Figure 1: UI Screen 1 - ESRI layer with AI suggestion icons.
Approach
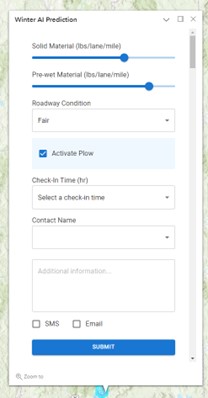
Figure 2: UI Screen 2 - Winter AI prediction screen.
The scope of this research involved three main components: creation of a deep neural network to suggest winter storm responses, investigating user-interface designs to organize response plans, and gathering consistent feedback from DOT experts to ensure alignment with current workflows. First, data was gathered from multiple historical sources and spatially and temporally aligned to create training examples representing a road segment over a 5-hour period. This processed data was then used to train and evaluate a transformer-encoder based model that predicts the type and quantity of material to use, activation of the snowplow, and severity of roadway conditions. Multiple iterations of the user-interface were then explored to find the optimal method for displaying model suggestions and tracking the overall status roadways during a winter storm. Throughout both components of research, frequent meetings with Vermont DOT were held to gain insight into their needs and suggestions for improvement.
Accomplishments
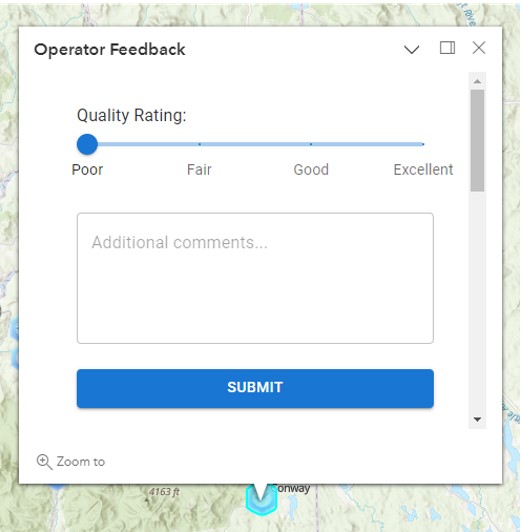
Figure 3: UI Screen 3 - Operator feedback.
When evaluated on a held-out test set of historic examples, our model was able to achieve a mean absolute error (MAE) of 28.9 lbs/lane mile for material predictions as well as 81% and 80% class-balanced-accuracy for plow status and roadway condition classification respectively. These results show the ability of the model to learn from previous examples, though known data quality issues from the AVL sensors are known to have hindered the training. Additionally, the user-interface design was well received by Vermont operators and has sparked interest in a pilot program of the software.