
Background
This research effort was focused on dynamic road environments, including locations such as school bus pick up and drop off locations and emergency incident responses. There is often increased pedestrian activity around the vehicles, creating additional safety concerns. The goal of this targeted research effort was to apply trajectory prediction methods to dynamically generate “virtual intersections” around specialized vehicles using the existing SAE standards-compliant vehicle-to-everything (V2X) MAP and signal phase and timing (SPaT) message structures. These virtual intersections accurately indicate expected behaviors for vehicles approaching the subject vehicle to protect vulnerable road users in the area.
Approach
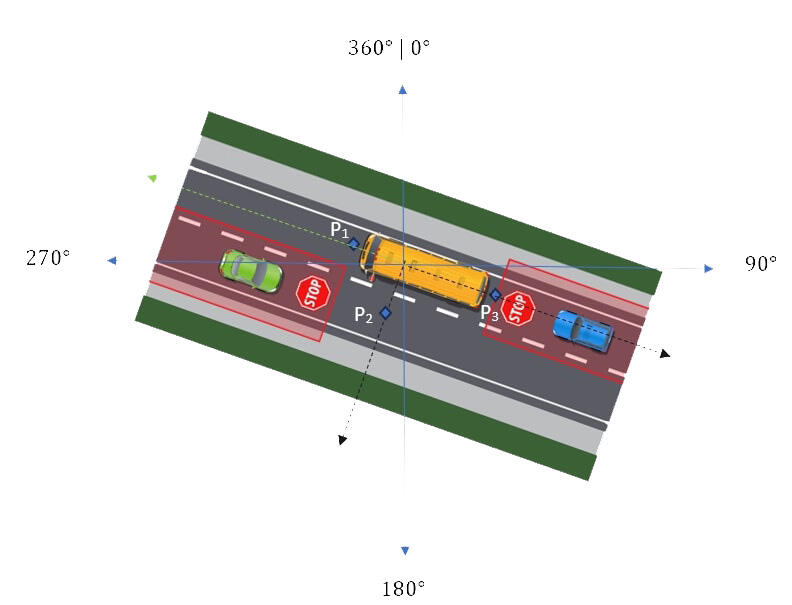
Figure 1: Stop bar offset calculation diagram.
Our first task was to determine dynamic stop locations and orientations for our virtual intersection. With the understanding that the vehicle heading would likely match the local road geometry, stop bars were offset from the subject vehicle’s pose (measured as a global position system [GPS] waypoint and heading). The center point of the stop bars became the starting point of the ingress lanes for the MAP message. Using path history and trajectory prediction, the rest of the ingress lanes were calculated and defined in the MAP message. Next, we enabled general purpose input/output (GPIO) pins to simulate the process of a specialty vehicle coming to a stop and initiating the generation of the MAP and SPaT V2X messages. Finally, we tested the generated messages for MAP and SPaT accuracy and device interoperability.
Accomplishments
We successfully generated MAP and SPaT messages and effectively created the “virtual intersections” we initially outlined. Additionally, our dynamically generated messages were interoperable with numerous OEM devices including Kapsh, Danlaw, and Cohda onboard units (OBUs).
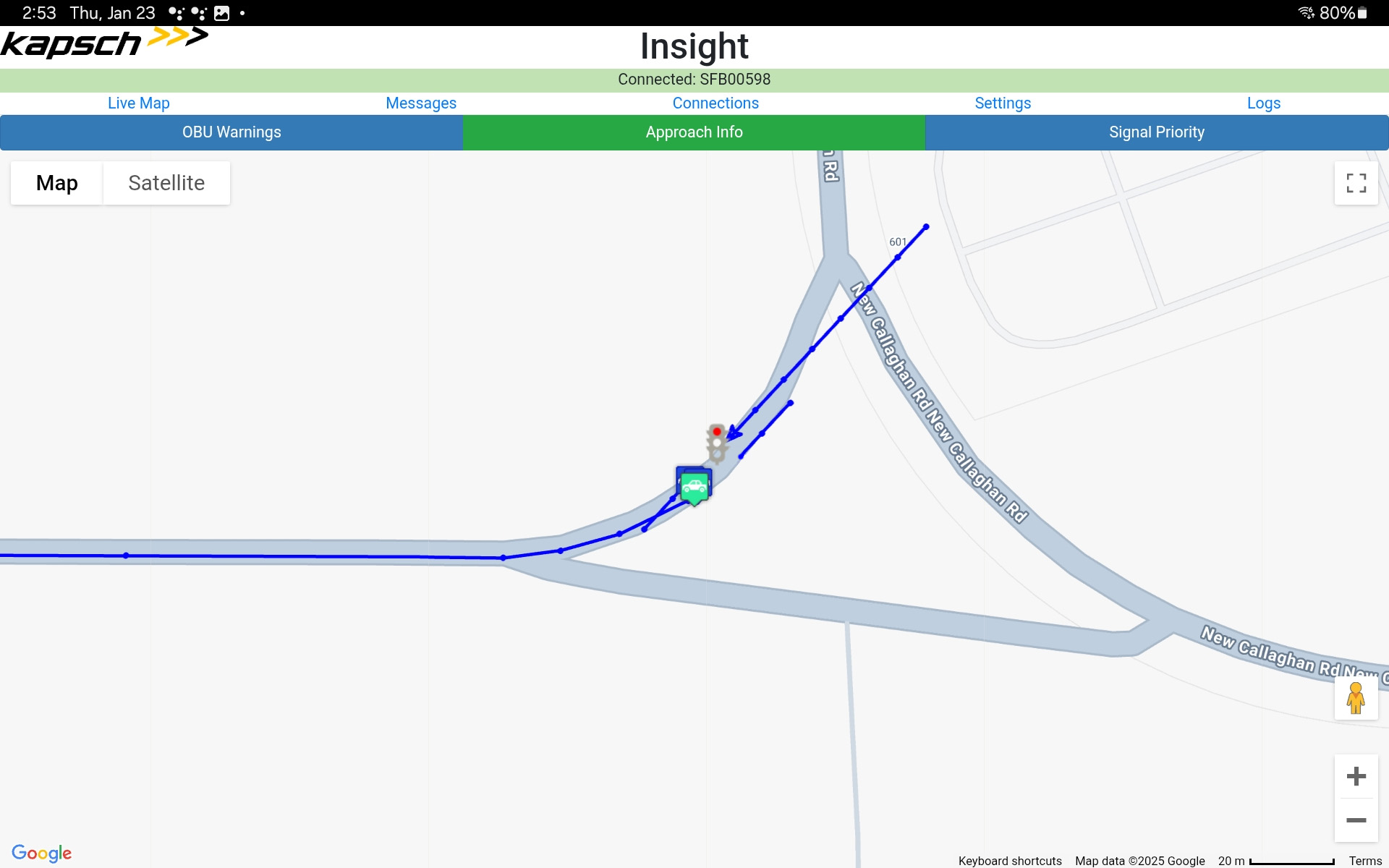
Figure 2: Kapsch Insight display showing interoperability with commercial vendor application.
Resulting Project Work
HNTB (GDOT)