
Background
Corrosion prevention, mitigation, and repair cost companies and government agencies an estimated $5.2 trillion annually. The cost of corrosion may be reduced by creating real-time indicators of environmental corrosion severity (ECS). Users could apply this knowledge of operational corrosion severity to make better decisions regarding materials, coating systems, and maintenance schedules. The emergence of corrosion sensor technology can provide the needed data. However, a reliable analytical approach to relating sensor data to corrosion damage over a broad spectrum of locations has proven elusive.
A common approach to determine ECS prediction is to use long-term averages of environmental parameters (such as relative humidity, temperature, and pollutants), geographic features (such as coastal proximity), and witness coupon corrosion rates of indicator materials to classify an environment into one of a small number of severity categories. However, ongoing work has revealed that brief changes in environmental conditions, even those lasting only a few hours, can significantly affect total corrosion damage. Therefore, long-term averages are not sufficient to accurately predict cumulative corrosion damage. Corrosion sensors are becoming an increasingly popular solution to more accurately measure the corrosion damage from these short-term events. SwRI has developed a simple approach that relates corrosion sensor data to severity, but validation is needed over a larger data set.
The first objective of this effort was to determine if SwRI’s current principal component analysis (PCA) approach to model corrosion from corrosion sensor data can be validated using a newly available corrosion sensor data set from 26 locations. A second objective was to determine if models based on spiking neural networks (SNNs) can be used to improve mass loss predictions from corrosion sensors using time-based input. The inability of a PCA to create a time-based model makes the SNN model approach more attractive. The goals were to model at least 90% of the corrosion events with an R2 above 0.85.
Approach
Corrosion sensors continuously measure environmental parameters such as relative humidity and temperature. Additionally, transducers capable of measuring conductance across gold interdigitated leads are used as a representative measure of the degree to which corrosive salt aerosols are deposited at a given location. Finally, low frequency impedance sensors are included to measure corrosion current. This corrosion current is relatable to corrosion damage experienced at a given location. A ranking of corrosion damage provides a framework for measuring ECS.
In this work, two methods were used to predict corrosion current from environmental parameters. First, the newly acquired corrosion data was used to validate SwRI’s previously developed PCA model. Next, an SNN model was developed to predict corrosion current. The corrosion current was subsequently integrated and compared with mass and volume loss data from witness coupons exposed with the sensors.
Accomplishments
SwRI’s PCA model, which predicts mass loss using only relative humidity (RH), temperature, and distance from the coast, initially exhibited poor performance when validated with new publicly available mass loss and sensor data. The comparison of mass loss to model predictions revealed a low R2 value of 0.013 with a high root mean square error (RMSE) of 127 mg/cm2 (Figure 1), indicating the initial approach was insufficient for accurate corrosion prediction. By incorporating conductance data, the model’s performance significantly improved, achieving an R2 = 0.903 and RMSE = 39 mg/cm2. However, the model’s limitation in predicting mass loss at new locations and over time reduces its effectiveness for managing corrosion.
An SNN model was developed using RH, temperature, and conductance data from the corrosion sensors to predict corrosion damage. An optimized feed forward network was developed that was able to predict the cumulative free corrosion sensor output at multiple locations with an R2 = 0.821 (Figure 2). Additionally, 86% of the corrosion events observed were correctly predicted. Cumulative free corrosion sensor output was used to predict corrosion damage with an R2 of 0.862 and RMSE of 47.38 mg/cm2 for mass loss and R2 of 0.93 and RMSE of 1.56×104 µm3/mm2 for volume loss. The relationship between predicted accumulated corrosion versus 12-month volume loss is shown in Figure 3. The model may be further improved to reduce the RMSE by adding new environmental parameters and by better understanding the relationship between corrosion damage and the cumulative free corrosion data.
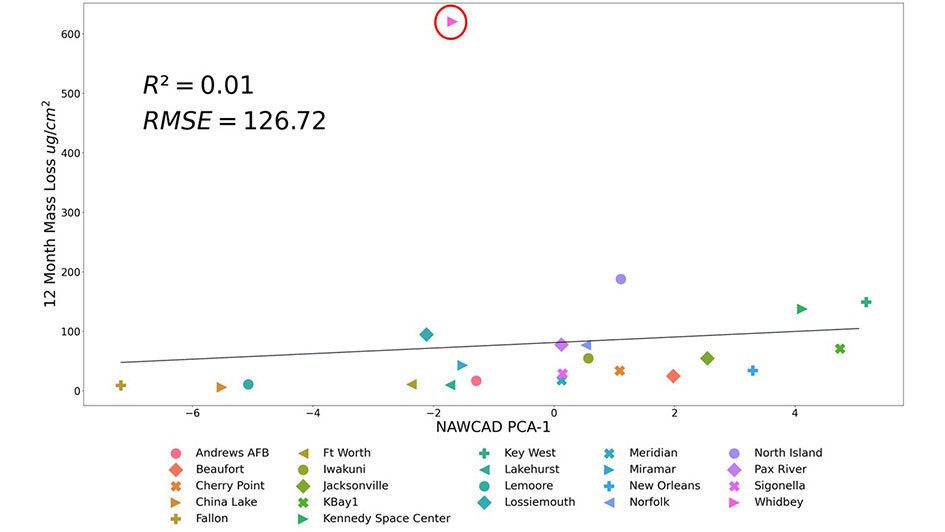
Figure 1: The relationship between PCA-1 and 12-month mass loss of AA7075-T6 witness coupons using distance from the coast along with RH × temperature cross term data.
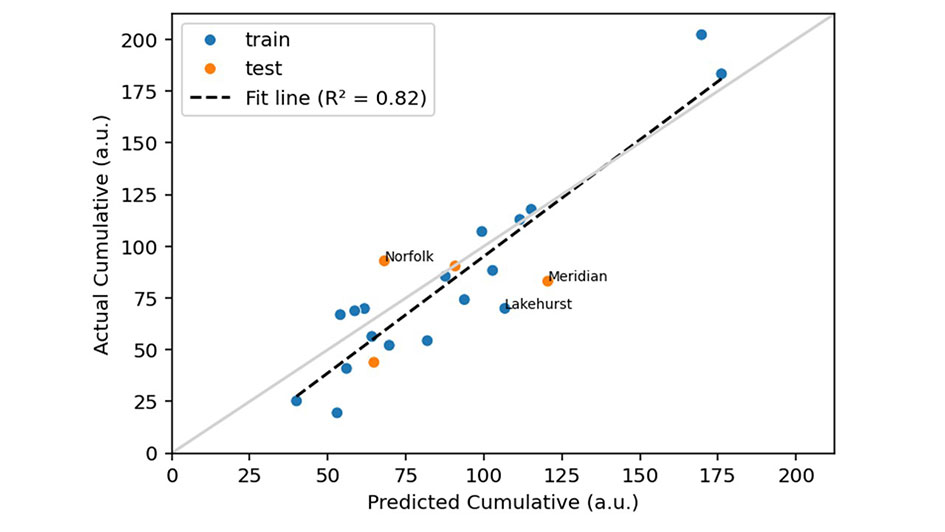
Figure 2: Actual versus predicted cumulative corrosion over held-out test data using an SNN model with conductance, RH, and temperature sensors as inputs.
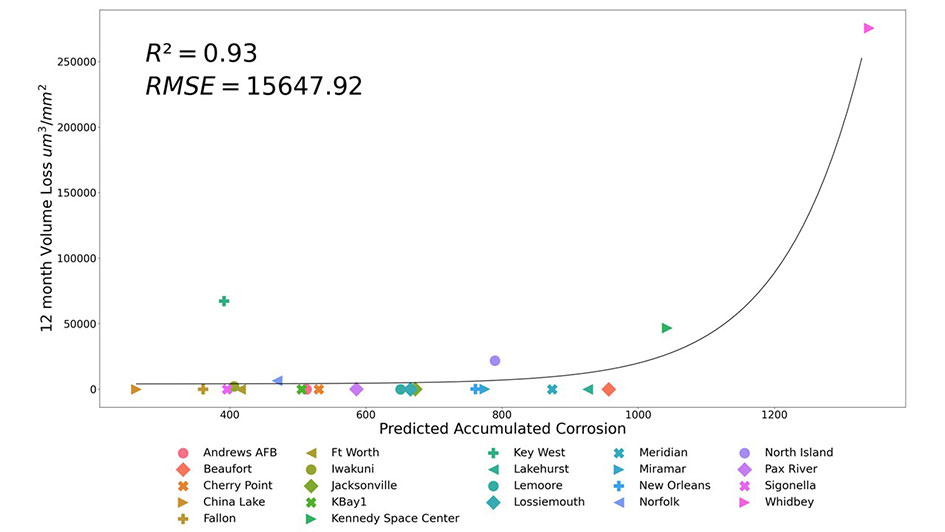
Figure 3: Predicted 12-month volume loss from model with conductance, RH, and temperature sensors as inputs on the entire dataset.
Presentations
Gonzalez, C., Hartnett, M., Hartnett, P., and Dante, J., “Spiking Neural Networks for Predicting Mass Loss from Corrosion Sensor Data.” AMPP Annual Conference + Expo, April 2025.