
Robots have been assisting humans in space for decades, extending the reach of human ingenuity and exploration. Robotics have been crucial for space exploration from the beginning, starting with uncrewed spacecraft that use automation technology to perform orbital missions, flybys or exploration of the solar system and beyond. Robots have also supported and maintained orbital infrastructure. In 1993, a robot arm helped astronauts repair the Hubble Space Telescope. Robot arms were also used to construct the International Space Station and deploy payloads from the space shuttle. Most of these early robotics applications were either teleoperated or hard-coded and preplanned before launch.
Today, preparations for the next generation of robots in space are using artificial intelligence and novel, high-performance computing to enable advanced automation. By leveraging capabilities from industrial automation and automated vehicles, NASA and the U.S. Space Force are pursuing similar robotic technologies that can operate in microgravity.
The commercial space sector alone could grow by 41% in the next five years, making space a new frontier for both exploration and economic development. Future space exploration will leverage robotics and automation to enable in-space servicing, assembly and manufacturing (ISAM) in orbit and on other planets. Both government and industry have a vested interest in on-orbit testing, transportation, refueling and manufacturing. Managing all this activity will require complex systems and interoperable technologies. Simply put, the future of space depends on robotics.
Southwest Research Institute has a long and successful history of implementing robotic technology in challenging environments from performing aircraft maintenance to verifying the integrity of tanks holding nuclear waste. Today, SwRI is developing several solutions within the emerging ISAM ecosystem. In 2022, SwRI launched the Maturing Adaptable Space Technologies (MAST) initiative, focusing on robot motion planning for challenging operations in space. MAST builds on nearly two decades of autonomy research, leveraging technologies from advanced automation for manufacturing robots, ground vehicles, aerial drones and more.
DETAIL
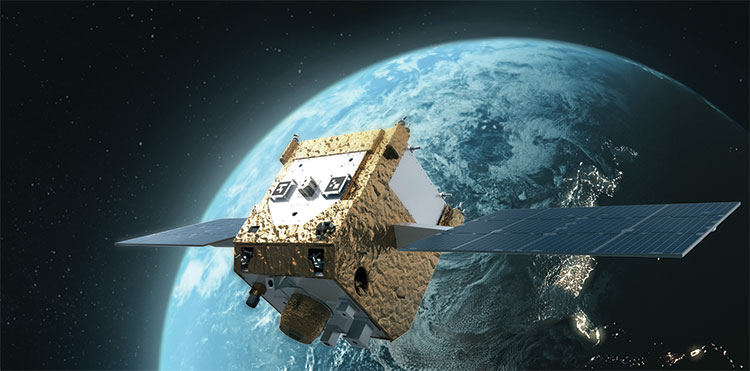
Image Courtesy ASTROSCALE U.S.
SwRI is helping a client develop spacecraft for satellite maintenance by designing, building, integrating and testing two servicing spacecraft. One spacecraft is designed to extend the life of in-orbit client satellites by docking with them and performing propulsive maneuvers intended to either return them back to service or move them to a disposal orbit beyond the crowded geostationary orbit. A refueler spacecraft, funded by the U.S. Space Force, is designed to dock with other satellites, delivering fuel to refuel client vehicles in geostationary orbit.
Adapting Terrestrial Technologies
Typical terrestrial motion planning involves waypoint planning, a preplanned series of robot motions to accomplish work, usually from a fixed position on a work bench or table. For industrial applications, SwRI has pioneered flexible and adaptable dynamic path planning algorithms for commercial off-the-shelf robotic arms coupled with advanced vision systems.
As opposed to waypoint planning, dynamic path planning uses sensor data about a robot’s environment to plan motion and execute tasks without collisions. When changes occur in the task or environment, the robot dynamically adjusts its motion planning. With a long history of successfully applying dynamic path planning to numerous challenging terrestrial tasks, researchers are now applying these same concepts to space.
However, the parameters for dynamic motion planning in space are different from those on Earth. Through collaboration with researchers and scientists across the Institute, SwRI developed a list of these parameters and constraints governing path planning for a free-floating space system.

For nearly 50 years, SwRI has developed large-scale robot systems to perform aircraft maintenance. This system, designed to robotically “depaint” the F-22 stealth aircraft, was the largest fully robotic system of its kind when it was installed at Hill AFB in 2011.
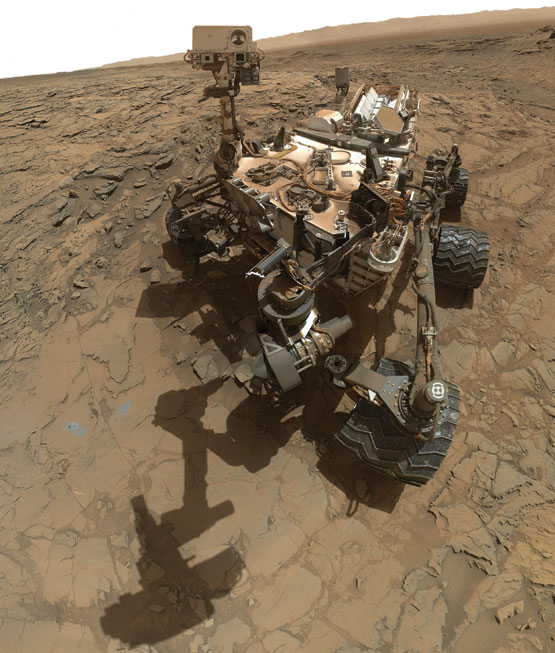
NASA’s Curiosity rover used autonomous navigation for the first time to determine the safest path forward and cover more territory on Mars. Curiosity carries the Radiation Assessment Detector, designed and built by SwRI to characterize the radiation environment on the surface of Mars.
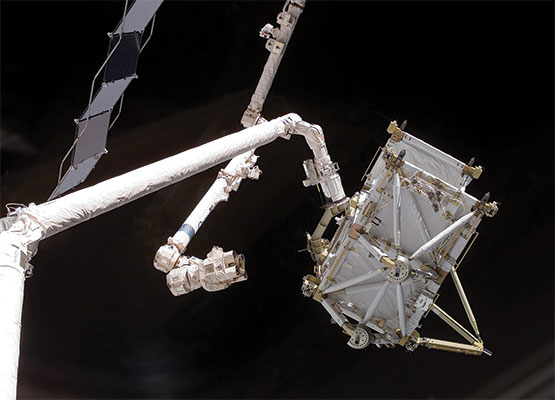
Image Courtesy NASA
The Canadarm2 on the International Space Station (ISS) is reaching for a truss segment to expand the ISS from the space shuttle Discovery’s Canadarm. The use of both elements in tandem earned the nickname of “Canadian Handshake.”
Traditional motion planning techniques are ineffective in the microgravity environment of space, given the dynamics of free-floating systems. If a robot arm is mounted to a relatively small spacecraft, as the robot arm moves, the base will also shift due to basic physics associated with equal and opposite reactions. This means that motion planning in space needs to account for this opposite reaction and intelligently plan for it.
That’s where MAST makes a difference.
MAST: Maturing Adaptable Space Technology
Over the last three years, SwRI investigated motion planning in a simulation environment and using physical hardware. SwRI engineers selected Drake, a physics-based open-source simulation environment, to model the robotic systems and surrounding environment, which offers “real world” physics similar to what you experience playing a video game. Drake also connects to an optimizer, allowing software to optimize parameters according to a set of weights and constraints.

SwRI developed a Vision for Off-Road Autonomy (VORA) tool, a passive camera system to perceive objects, model environments and simultaneously localize and map while navigating off-road environments — including exploring planetary surfaces, as demonstrated here at an analogous Earth setting.
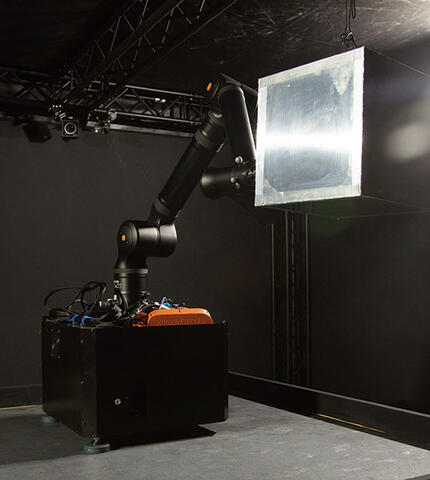
Because sustained microgravity cannot be replicated on Earth, SwRI researchers needed a practical way to physically validate the models and motion plans generated under MAST. To simulate microgravity conditions, SwRI commissioned its Space Robotics Center, which features a platform that floats using air bearings on a flat surface — like a giant air hockey table — to simulate low-gravity conditions. It enables a mock spacecraft with a robotic arm to “float” on the surface of the table, freely rotating and moving along the surface of the table. The facility also features a motion capture system and controllable lighting to improve video capture of the robotic arm and better mimic the harsh lighting conditions in space.
When the MAST software generates trajectories, the first step is to set a seed trajectory, a terrestrial plan of how to move from the start to end states, as well as a set of optimization parameters. For example, a common use case limits the motion applied to the spacecraft a robot is mounted on, possibly including returning it to its starting location. Then, MAST runs the optimization using Drake’s physics engine to plan motions that account for and constrain the motion of the entire system, i.e., a robot arm mounted on a spacecraft.
DETAIL
Underactuated robots have fewer independent control inputs than total degrees of freedom, and consequently, their control systems cannot follow arbitrary trajectories.
SwRI developed a completely different class of planning algorithms for MAST in comparison to those used on Earth. These algorithms must consider the dynamics of the full system. They are designed to plan higher-speed motions for underactuated systems while simultaneously constraining the induced motion on the host platform, such as momentum minimization, orientation disturbance, etc.

SwRI Senior Research Engineer Michael Ripperger validates MAST motion plans in the Space Robotics Center, using this 600-pound simulated robot that glides over the granite slab, much like a puck on a giant air hockey table, enabling three-axis motion that includes vertical rotation through the robot-platform center of mass, getting the robot end effector tool close to a target.

SwRI addressed the small movements needed to position the robot exactly where it’s needed to use real-time visual feedback from cameras to position a robot arm controller. This enables smaller movements key to the grasping and mating capabilities needed for space applications.
MAST offers two different modeling environments to generate robot trajectories — an in-space microgravity simulation environment and the Space Robotics Center, which has gravity but allows the robot to “float” along the the surface of the table. SwRI can take trajectories generated in the simulation environment and implement them using hardware to demonstrate and assess performance in the Space Robotics Center.
During the final phase of the MAST program, SwRI improved its Space Robotics Center capabilities to address the small movements needed to position the robot exactly where it’s needed. Terrestrial robotics address this with visual “servoing,” which uses real-time visual feedback from cameras to position a robot arm controller. SwRI modified the technique to enable smaller movements key to grasping and mating capabilities needed for space applications.
Space Robotics Launch
MAST played a key role in launching SwRI’s space robotics program. Over the past several years, MAST has grown from an internal research program into a larger effort with external collaborations, including projects tackling technical challenges with the government and commercial clients. SwRI has leveraged nearly two decades of research and development in machine vision, industrial robotics and automated systems, applying proven Earth-based autonomy technologies — such as those used in industrial robotics and driverless vehicles — to the unique demands of space applications.
Space Assembly
Manufacturing and assembling structures in space is an inevitable necessity. Building larger structures in space eliminates the limitations imposed by launch vehicle size and weight constraints, allowing for the construction of larger, more complex systems. Additionally, in-space assembly reduces the risks and costs associated with launching preassembled large structures or deployable structures, enabling a more efficient use of launches and innovative designs. Robotics and automation are key to this future. Given that robotic manufacturing and assembly have been used terrestrially for decades, there are a lot of existing capabilities that the space industry can leverage.
To address orbital clean-up of the estimated 100 million pieces of space debris, ranging from 1 millimeter to over 10 centimeters and weighing more than 9,000 metric tons, SwRI developed techniques to address the challenges of space, including shiny objects that could stymie many computer vision systems.
On-Orbit Refueling
In-space refueling is another critical capability designed to extend the operational lifespan of satellites and other space assets, particularly high-value spacecraft in geosynchronous orbit. Autonomous systems use cameras and image processing algorithms to accurately assess the orientation and motion of the target satellite, allowing the servicing spacecraft to dock or grapple the client spacecraft. Once the rendezvous is complete, the docking mechanism or robotic arms can connect refueling hardware. Performing this process autonomously reduces the risk of human error and enhances the safety and reliability of in-space refueling operations. Once refueling becomes a routine operation, autonomous robotic systems equipped with cutting-edge computer vision technology will play an essential role in preserving the functionality of high-value space assets. These operations could significantly lower operational costs, paving the way for more sustainable space exploration and commercialization.
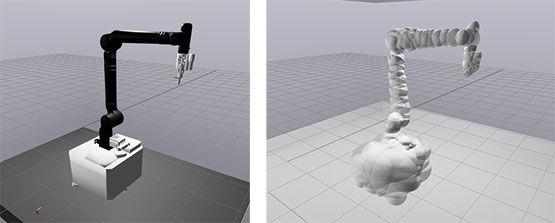
Using Drake simulation software, SwRI develops a visual model to plan robot motion. The platform verifies the model in terms of visual and collision geometry as well as kinematic structure before progressing to true simulation.
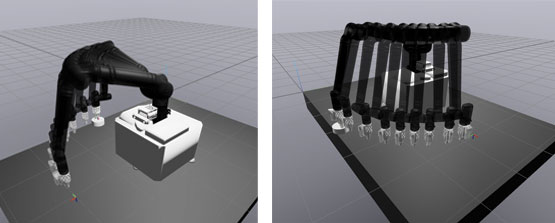
SwRI developed this robot manipulator tool to operate on three axes, indicated by red, blue and green arrows, to visualize motion planning optimization.
Space Junk Cleanup
Robotics will also be key tools for cleaning up space junk, defunct human-made objects orbiting the Earth, including old launch vehicles, spent rocket stages and fragments from collisions. Autonomous systems equipped with cameras and image processing software can detect and track space debris in orbit. These robots use computer vision to navigate the complex space environment, identifying debris movements for careful approach. Robotic arms can then grasp the debris for collection or deorbiting to prevent collisions with operational satellites, reducing the need for human interventions while helping mitigate the growing issue of space debris and ensuring safer, more sustainable space operations.
MAST Moving Forward
With the MAST internal research project wrapping up, the team is looking for ways to test the software pipeline in microgravity and starting a range of externally funded programs advancing aspects of the software. This research has positioned SwRI to meet the emerging needs of the space sector, for NASA, USSF and the commercial market.
The future of space operations will depend on robotics that can adapt, perceive and respond in environments where humans can’t — or can’t easily — go. Through the MAST program, SwRI has matured trusted terrestrial technologies for sensing, perception and manipulation for transition to space. This research directly supports emerging ISAM needs and reflects a heritage in advanced manufacturing. The goals focus on delivering robotic solutions ready to perform in dynamic, unstructured environments to support the next generation of space exploration missions. These goals will support a sustainable human presence in space, on the Moon and Mars, and beyond.
Questions about this story or Space Robotics Engineering? Contact Meera Towler at +1 210 522 6339.

ABOUT THE AUTHOR
Meera Day Towler is a program manager focusing on business development, project management and strategy coordination for a highly successful space robotics program area. She is currently focused on transitioning SwRI’s terrestrial robotics and autonomy technologies for use in space.