
Naval and maritime ships require labor-intensive maintenance and repair practices that have been slow to change over decades. Modernizing so-called naval sustainment through robotics and automation can help meet demand for warfighting assets as naval shipyards experience tight deadlines, aging facilities, and limited access to dry docks. Ship welding, sanding, and painting are some of the activities that meet the “Three Ds of Automation.” They are dirty, dull, and dangerous tasks. However, the shipyard environment poses challenges for a typical robot installation.
Southwest Research Institute is developing naval and maritime robotics solutions to help the U.S. Navy and commercial shipping clients build in sustainment efficiencies through modern technology. SwRI leverages over 30 years of custom robotic design experience with similar sustainment challenges in the fields of aerospace, defense, and manufacturing.
Naval Robot Research & Development
Image
A brand-agnostic robotics solution provider, SwRI investigates the specialized requirements of the naval ship sustainment process targeted for automation. We build automation solutions to provide systems that accomplish the task objectives. Our robotics team has world class facilities for simulating the application environment as well as de-risking process studies in laboratory environments. The most common benefits of automation with U.S. Navy robots include increasing human safety, reduction of human exposure, increased process repeatability, and increased production throughput. Applications include:
- Hull Cleaning and Maintenance
- Ship Inspections
- Process Automation
The following are specialized areas of SwRI’s ongoing research for Navy and maritime applications:
Image
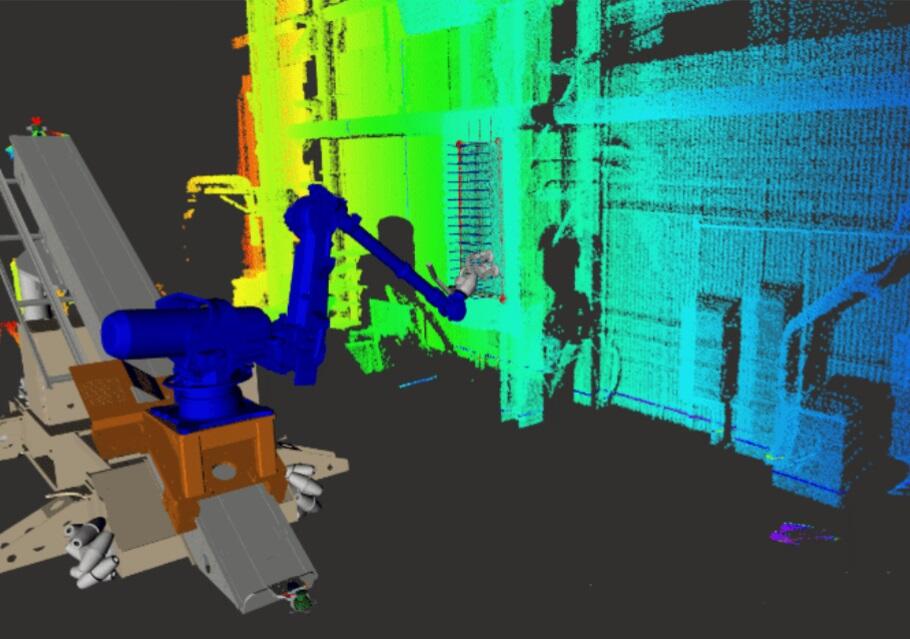
- Confined spaces are typically defined as enclosed areas with small access ports. The access ports may be elevated, and the floor of the confined space may be curved or contain ribs. Confined spaces may consist of a series of smaller cells, connected by sharp turns or elevated accessways. Our research focused on early system concepts for navigating an arbitrary array of enclosed chambers, connected by raised openings, while performing processes involving a non-trivial level of force.
- Exterior Processing requires removal of existing paint, rust inhibitor, corrosion, or biofouling from the hull. A robotic system would be configured to access complex facets of the ship via a gantry system or a mobile platform. The system would automatically locate modules within the workspace and plan process paths appropriate for the unique geometry. The appropriate removal operation would be controlled from an operator control station.
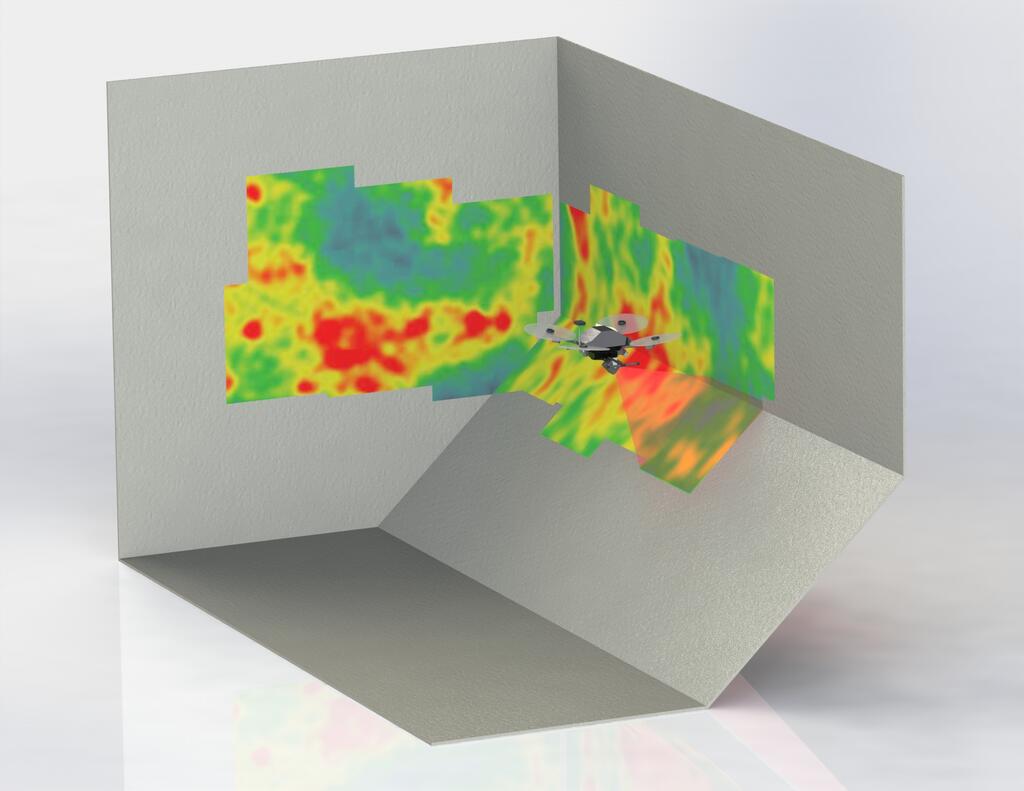
- Corrosion Detection: The required level of effort for sustainment activities is often unknown and difficult to plan.These areas are unsafe or confined locations and not human accessible. An inspection system can leverage automated vehicles and novel sensing technologies to inform sustainment planners of the current ship condition. The system could leverage different platforms including unmanned aerial vehicles (UAVs) or unmanned underwater vehicles (UUVs).
Image

The World's Largest Industrial Robot
How we built a 20-ton, five-story robot that uses a 20kW laser to remove paint from commercial aircraft.
Related Services
Learn more about SwRI’s multidisciplinary technical solutions from deep sea to deep space.