Background
There are three main capabilities required for successful autonomous unmanned aerial system (UAS) flight: perception, localization, and navigation and control. In other words, the UAS must be able to 1) perceive/understand its environment, 2) determine its position in its environment, and 3) interact with its environment. For fully autonomous flight, the UAS must perform all functions using only on-board computers, which can be severely limited in computational power due to size, weight, and power constraints. For this internal research and development project, the team is building SwRI’s UAS autonomy technology offerings with specific emphasis on camera-based perception, navigation and control, GPS-denied localization, and algorithm optimization. Research and development are needed in these areas due to key differences between ground-based autonomous vehicles and small, autonomous UASs.
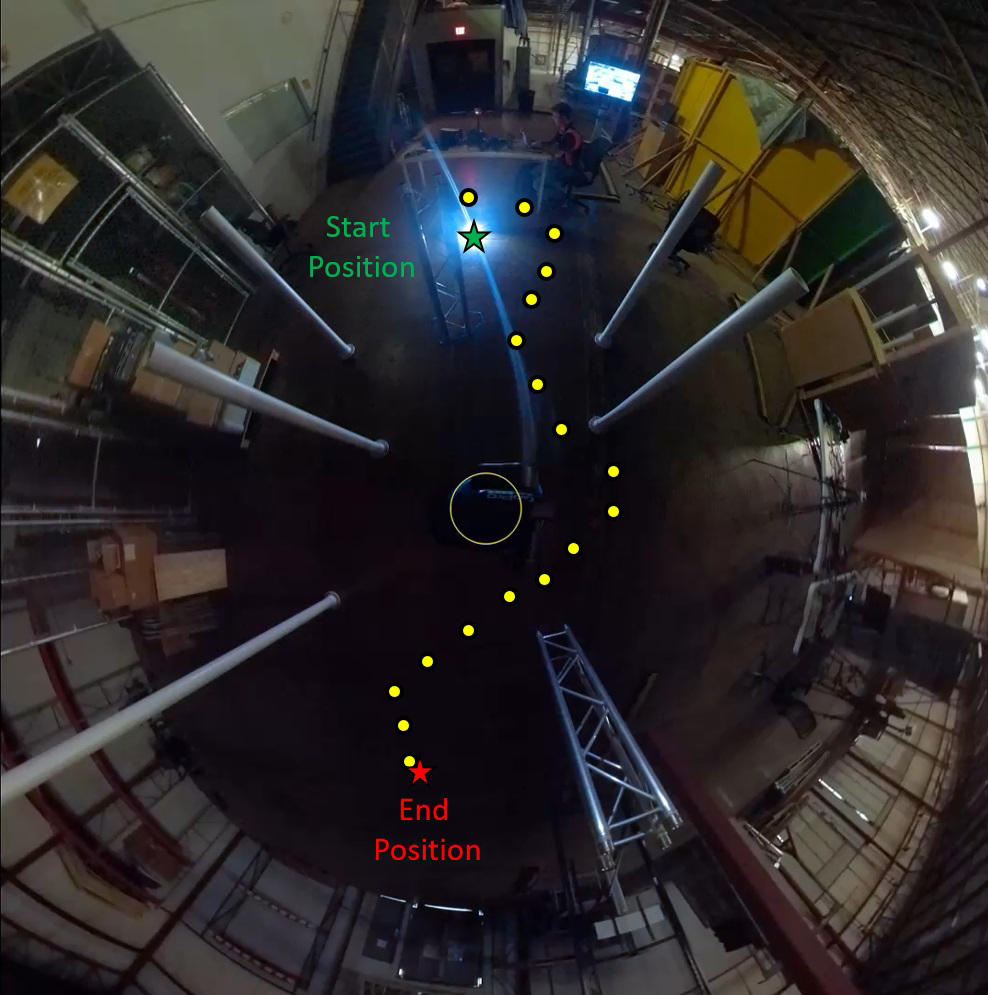
Figure 1: “Little Planet” view of the UAS flight path (yellow circles) during one of the open, ground-based obstacle course tests.
Approach
The primary objective of this research effort is to build SwRI’s core UAS autonomy technology offerings (i.e., perception, localization, navigation and control, and algorithm optimization) so that we can leverage them in client-funded programs. To accomplish this objective, this effort was split into two phases. Phase 1 focused on building the UAS platforms and developing the individual autonomy components. Phase 2 focuses on enhancing system capabilities, integrating core software components, and adapting the system for operation in visually degraded environments.

Figure 2: Screenshots of the UAS (red circle) during one of the Test 2 experiments.
Accomplishments
During Phase 1, the team built UAS platforms, adapted the system for operation in dark environments, developed object detection software, developed localization capabilities, and developed navigation and control software. Phase 1 culminated with a demonstration of the UAS autonomy components via three distinct tests. During the first test, the UAS autonomously navigated an open, ground-based obstacle course in the dark (Figure 1). The successful completion of this test demonstrated that the UAS can follow a global flight path, detect obstacles, and avoid obstacles. During the second test, the UAS completed an autonomous extended flight in a dark, cluttered, GPS-denied environment (Figure 2). The successful completion of this test demonstrated that the UAS can follow a target flight path while avoiding known obstacles. During the third test, the UAS autonomously flew through a small portal (Figure 3). The successful completion of this test demonstrated that the UAS can follow a global, 3D flight path and enter and exit areas via small openings.

Figure 3: Screenshot of the UAS (red circle) flying through a small opening between two areas.