Background
Recent years have seen increased demand for unmanned aerial systems (UAS) that can navigate and explore confined spaces such as caves, buildings, or pipes. More traditional UAS exploration relies on computationally intensive algorithms, which include running simultaneous localization and mapping (SLAM), deep learning, and complex planning. Moreover, these platforms typically use lidar sensors which are very heavy relative to UAV platforms. This approach is not suitable for small, autonomous robots that need to quickly navigate an environment. This project sought to solve these problems with a size, weight, and power (SWaP)-constrained UAS with smaller payloads and lightweight algorithms.
Approach
A new small UAS platform was set up for this project that uses a time-of-flight (ToF) camera that is significantly lighter than a lidar. ToF cameras project infrared light to produce a 3D point cloud of the environment which is used for mapping an obstacle detection. The ToF range is generally much shorter than that of lidar (approximately 4 m versus 40+ m); however, the ToF cameras weigh less than 10 g in comparison to lightweight lidars that can exceed 500 g.
A frontier layer algorithm identifies potential frontiers in the operating environment in 3D. Frontiers are areas where the UAS’s map transitions from observed to unobserved space. Generation of 3D frontiers allows for exploration in multi-level buildings and unstructured environments, such as caves. A synthetic “cost” of a frontier is calculated based on its distance from the platform and the amount of transitional occupancy data contained within the frontier. An exploratory planner sends the optimal frontier to the local planner and determines when to plan a “return to home” path.
Accomplishments
SwRI successfully set up a new SWaP-constrained platform and implemented new and updated exploration algorithms to deal with the SWaP constraints. The mapping system works with a limited range and field-of-view (FoV) ToF sensor on the UAS platform and is extensible to other similar sensors and platforms. The frontier layer supports true 3D exploration that ensures the environment is explored thoroughly with the limited FoV sensor while maintaining sufficient localization. The platform was able to explore and map several different test fixtures that were set up to evaluate the exploration capability.
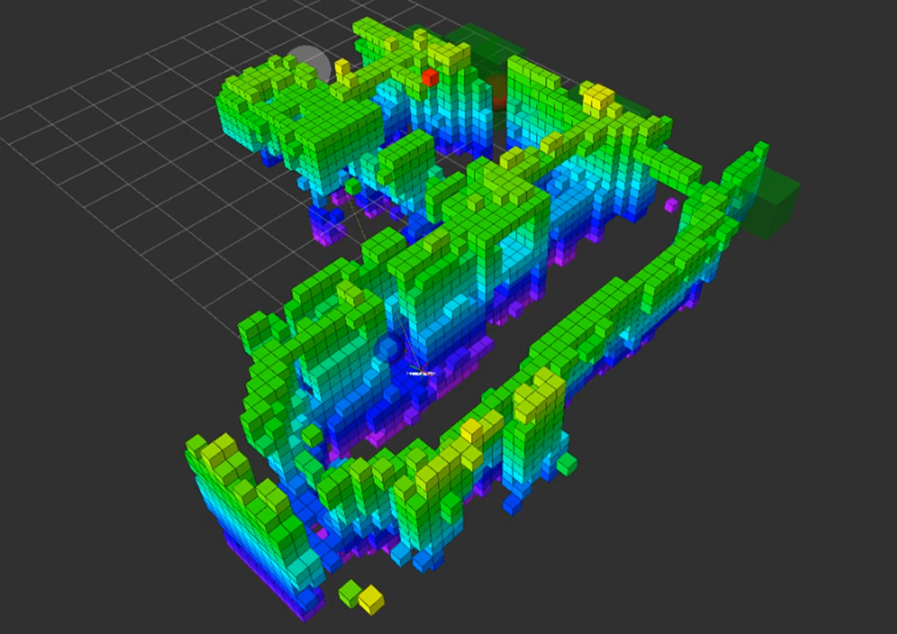
Figure 1: Map generated during exploration in a confined test fixture.