Background
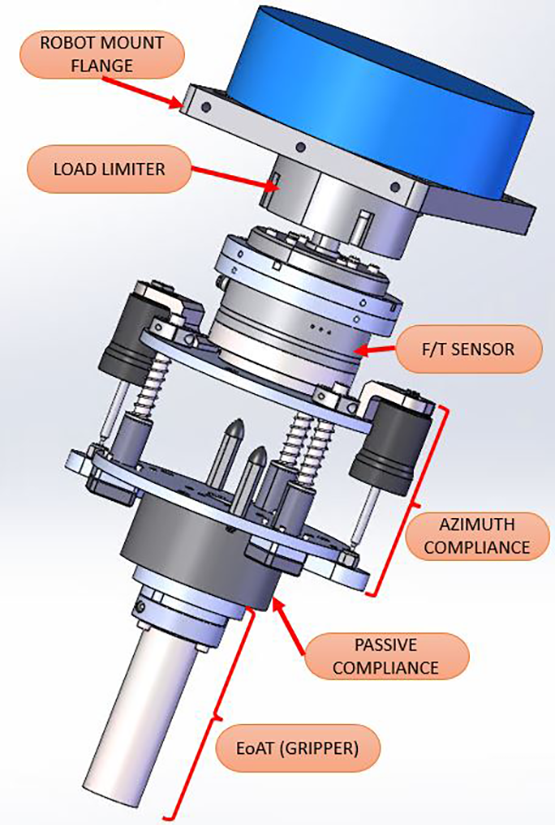
Figure 1: Passive and active compliance components
Industrial robots are typically designed to be rigid, repeatable, and highly accurate. This is ideal for industrial manufacturing lines designed for high-speed pick and place operations. However, if a robot’s task involves the assembly of objects, rigid position control will not be enough to overcome tight tolerances on most machine parts, which usually range from 10–100 μm (0.39–3.9 mil). This tolerance is on the order of an industrial robot’s repeatability, so errors where a robot faults and damages components are unavoidable. To solve this problem, roboticists have tried passive devices to introduce self-correcting compliance to the end effector, but, while successful, the range of passive compliance is limited. To increase the usability range in industrial assembly applications, roboticists need to combine passive and active compliance, but a commercially available system that combines both control regimes is not available.
Approach
The objective of this project is to improve the performance of force/torque (F/T) reference tracking for precision assembly tasks with the addition of passive compliance and an F/T sensor between the robot tool flange and the end-of-arm tool (EoAT). This project seeks to develop a combined passive and active compliance methodology on a collaborative robot platform (Universal Robots UR10e) and an industrial manipulator (Motoman MH180-120) to capture a range of assembly processes. For active compliance, we are using the ROS Cartesian controllers package to implement cartesian F/T tracking. For passive compliance, we integrated a commercially available compliance mechanism with a novel EoAT that incorporated azimuth compliance with damping (Figure 1). We are developing an assembly application that provides a generic capability for SwRI to complete robotic precision assembly tasks which can be applied to a large range of different robot types and manufacturers. This application will use the assembly tools being developed under the active NIST cooperative grant (10-26497) to conduct assembly experiments. We will validate the passive and active assembly application via a set of experiments that use common industrial components, such as cylinders and splined shafts, which also have a size range to simulate small to large precision assemblies. The team will further develop the capacity to assemble sequential components, such as aircraft fuel couplings, which require two distinct assembly steps (insertion followed by a twist to lock).
Accomplishments
To date, we developed novel methods to assess contact stability when using an EoAT with passive compliance and F/T feedback. We determined the largest proportional gains that did not compromise contact stability (Figure 2). We have shown that the addition of passive compliance to active compliance permitted proportional gain increases of up to 60%, which decreased the time needed to reach contact stability. Initial tests assembling precision cylindrical components where the clearance between the mating parts is 0.001” have been successful. The work will continue to develop the assembly application for splined shafts and sequential assemblies with a planned completion date of March 2023.
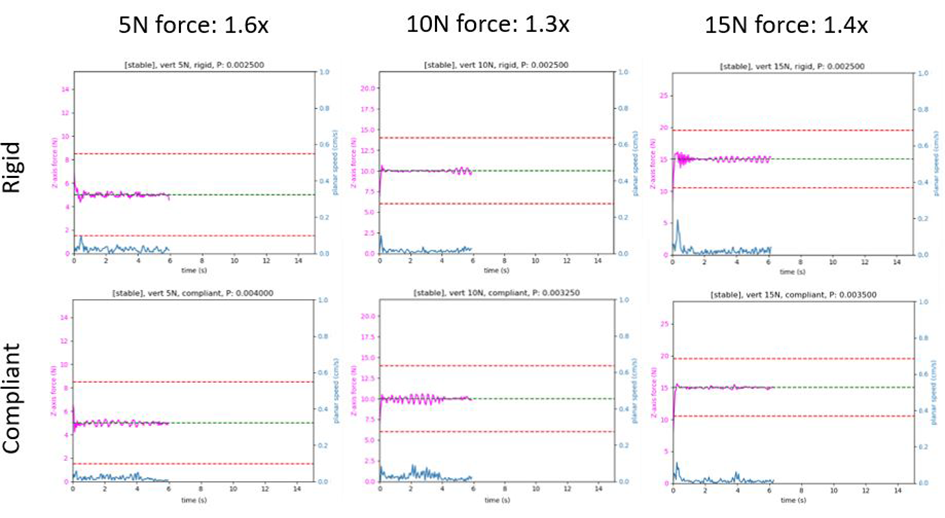
Figure 2: Proportional gain improvements