Submitted by Matt Robinson on Fri, 03/01/2024
An industry push for more automation solutions is advancing the robot operating system (ROS) beyond the academic and manufacturing domains into agriculture, automotive, retail, healthcare and more. Various forecasts project the open-source advanced robotics market will grow more than 10% annually between 2024 and 2029.
These trends are motivating for robotics engineers at Southwest Research Institute and our colleagues at the ROS-Industrial Consortium and supporting industries. We also recognize that the usability of robotics software is still an impediment to even higher levels of adoption.
Over the years, the ROS-I Consortium has held frequent roadmapping sessions with a wide variety of end users and ROS developers, to address ease-of-use and continuing education. The identified need is a lower barrier of entry for non-programmers (or entry-level developers) to harness the power of tools in the ROS ecosystem, but in a way that aligns with industry adoption of digital thread and industry 4.0 strategies. The traditional ROS workflow is software programming intense, requiring developers deeply familiar with available ROS libraries and tools. Even experienced developers within the ROS-I ecosystem, and beyond, may spend significant time (days to weeks) on the initial setup and configuration of a ROS application. Listening to the voice of our own developers, our diverse stakeholders, and consortium members, we heard the need for easier access to the ROS motion planning tools, while maintaining a tie back to the CAD ecosystem where the products to be worked on are conceived and maintained.
SwRI Workbench for Offline Robotics Development™ (SWORD™) is a CAD-based toolkit that can revolutionize deployment of advanced robotics. SWORD allows manufacturing engineers to independently utilize complex robotics and simplifies motion planning for seasoned robotics developers.
SWORD is a Graphical Toolkit for Robotics Developers
Thus, SwRI is launching the SwRI Workbench for Offline Robotics Development (SWORD)™ featuring a graphical toolkit for developing and testing advanced robotic motion-planning applications. SWORD is implemented as a plugin to the open-source FreeCAD application, allowing users to integrate robotics capabilities into a cross-platform CAD environment. It provides a graphical interface to many powerful motion-planning libraries. The goal is to bring ROS to a manufacturing/industrial audience in a way that is more approachable and resides in an environment that is familiar. Most manufacturing engineers are competent with CAD and understand their processes, often doing various forms of programs on process-oriented systems. SWORD seeks to bring advanced motion-planning capability to this audience enabling to set up their systems and take advantage of these more advanced tools in their operational environments. Through the first Beta test, the team at SwRI has collected feedback from end users and is nearing the release the first version of SWORD. SWORD currently offers the below capabilities:
Environment Modeling
Create workcell model (robot, fixtures, end-of-arm-tooling), Figure 1
Use CAD modeling tools or import existing CAD/mesh models
Use Convex Hull and Decomposition tools to generate collision geometry
Import and export URDF files
Manipulate robot position
Joint Sliders to control individual joint positions
TCP Dragger to simulate movement using various IK solver
Command Language
Define robot motion using either Cartesian or Joint waypoints
Currently waypoints must be manually defined, but import and CAD-generated waypoints are planned for an upcoming release.
Specify different move segment types (joint/cartesian) and motion groups
Insert supplementary commands (I/O, delays, etc.)
Motion Planning
Generate motion plan using a variety of Tesseract-supported path planners
Currently uses default Profiles (configuration) for each planner, but profile editing is planned for an upcoming release.
Create custom planning pipelines for application-specific behavior, Figure 2
Compute the Allowed Collision Matrix
Currently no way to review or adjust the results, but this functionality is planned for an upcoming release.
Review computed motion trajectory
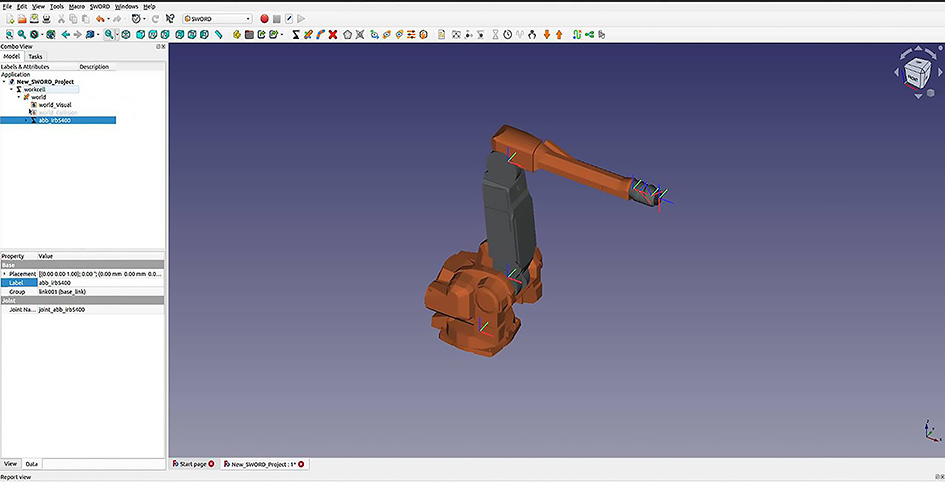
Figure 1: An example of URDF creation and evaluation in SWORD.
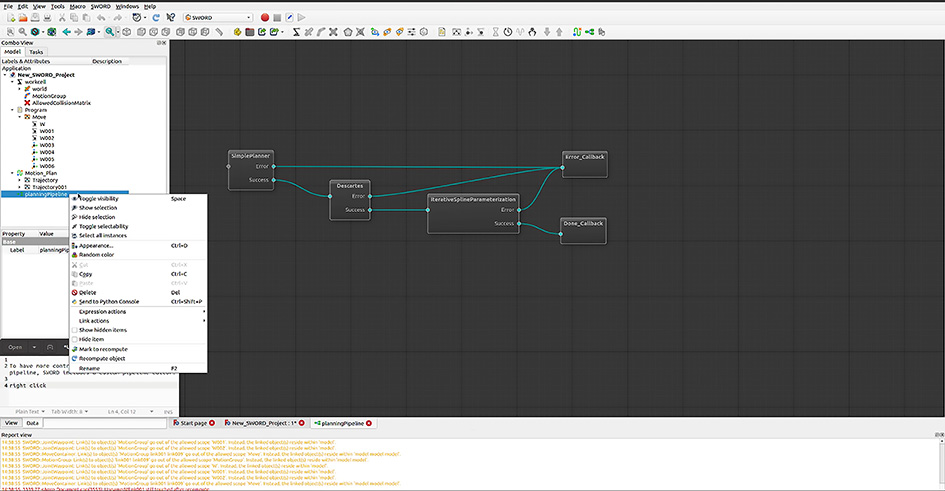
Figure 2: Setting up a motion planning pipeline for testing and evaluation in SWORD.
SWORD is officially released, and seats are available. A trial version may be requested to help you understand if it is right for your organization. If you are interested in a trial license, or want to learn more, or get a guided tour, please contact Jeremy Zoss or Matt Robinson. Check out the website at sword.swri.org.